REER-Mosaic Manual
MOSAIC - Installation and use manual
MOSAIC - Installation and use manual

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
MODULAR SAFETY INTEGRATED CONTROLLER MOSAIC<br />
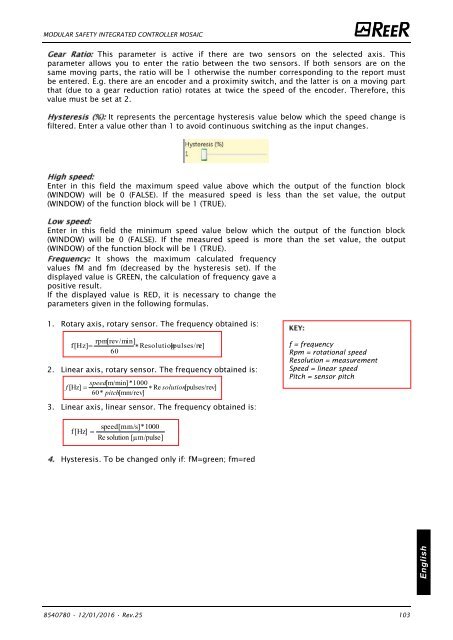
This parameter is active if there are two sensors on the selected axis. This<br />
parameter allows you to enter the ratio between the two sensors. If both sensors are on the<br />
same moving parts, the ratio will be 1 otherwise the number corresponding to the report must<br />
be entered. E.g. there are an encoder and a proximity switch, and the latter is on a moving part<br />
that (due to a gear reduction ratio) rotates at twice the speed of the encoder. Therefore, this<br />
value must be set at 2.<br />
It represents the percentage hysteresis value below which the speed change is<br />
filtered. Enter a value other than 1 to avoid continuous switching as the input changes.<br />
Enter in this field the maximum speed value above which the output of the function block<br />
(WINDOW) will be 0 (FALSE). If the measured speed is less than the set value, the output<br />
(WINDOW) of the function block will be 1 (TRUE).<br />
Enter in this field the minimum speed value below which the output of the function block<br />
(WINDOW) will be 0 (FALSE). If the measured speed is more than the set value, the output<br />
(WINDOW) of the function block will be 1 (TRUE).<br />
It shows the maximum calculated frequency<br />
values fM and fm (decreased by the hysteresis set). If the<br />
displayed value is GREEN, the calculation of frequency gave a<br />
positive result.<br />
If the displayed value is RED, it is necessary to change the<br />
parameters given in the following formulas.<br />
1. Rotary axis, rotary sensor. The frequency obtained is:<br />
rpm[rev/min]<br />
f[Hz]<br />
<br />
Resolution<br />
[pulses/re v]<br />
60<br />
2. Linear axis, rotary sensor. The frequency obtained is:<br />
speed[m/min]*1000<br />
f [Hz] <br />
Re solution[pulses/rev]<br />
60* pitch[mm/rev]<br />
f = frequency<br />
Rpm = rotational speed<br />
Resolution = measurement<br />
Speed = linear speed<br />
Pitch = sensor pitch<br />
3. Linear axis, linear sensor. The frequency obtained is:<br />
f[Hz]<br />
<br />
speed[mm/s]*1000<br />
Re solution [µm/pulse]<br />
Hysteresis. To be changed only if: fM=green; fm=red<br />
English<br />
8540780 • 12/01/2016 • Rev.25 103

![BRESIMAR(asaTek)-Beckhoff-Livro Formação Técnica TwinCAT 2-v1.2_2009 [pt]](https://img.yumpu.com/62853104/1/190x245/bresimarasatek-beckhoff-livro-formacao-tecnica-twincat-2-v12-2009-pt.jpg?quality=85)