

UWE Bristol Engineering showcase 2015

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Richard Thompson<br />
Motorsport <strong>Engineering</strong><br />
Project Supervisor<br />
Dr Benjamin Drew<br />
Improving the stability of three wheeled vehicles<br />
Preventing a three-wheeler from rolling over is very different to conventional cars. Unlike conventional cars where braking will make the system more stable,<br />
the nature of the geometry means it will actually be more likely to overturn. With this in mind, developing an ESP system for a three wheeler like a Reliant<br />
Robin needs to focused around torque vector control.<br />
Axis Title<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
0<br />
8.1<br />
Three Wheel Rollover Under Acceleration (0.25g)<br />
11.4<br />
13.9<br />
16.1<br />
18<br />
19.7<br />
0 20 40 60 80 100 120<br />
Axis Title<br />
21.3<br />
22.7<br />
24.1<br />
25.4<br />
Accelerating through the corner is actually<br />
favourable for a delta three wheeler with regards<br />
to stability, the acceleration that can occur as a<br />
consequence of torque vectoring is beneficial.<br />
Three Wheel rollover under acceleration (0.5g)<br />
Project summary<br />
This study consists of an investigation into the<br />
rollover stability of three-wheeled vehicles with a<br />
single front wheel, and if the implementation of an<br />
electronic stability program could improve it.<br />
Project Objectives<br />
• To research and understand rollover of three<br />
wheeled vehicles<br />
• To develop a mathematical model for three wheel<br />
rollover .<br />
• Research into the functionality behind ESP<br />
systems.<br />
• To devise a method for increasing the rollover<br />
threshold of the vehicle.<br />
30<br />
This graph results from an input acceleration of<br />
0.5g. The additional longitudinal acceleration<br />
stabilises the vehicle round the corner compared<br />
to the graph above with a lesser value of a. This<br />
illustrates a small element of how controlling<br />
torques can stabilise a three-wheeler<br />
Image below is of a differential capable of<br />
supplying different torques to each wheel.<br />
Axis Title<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
26.6<br />
25.2<br />
23.8<br />
22.2<br />
20.6<br />
18.8<br />
16.8<br />
14.6<br />
11.9<br />
8.4<br />
0<br />
0 20 40 60 80 100 120<br />
Axis Title<br />
Understeer gradiant<br />
0.05<br />
0.04<br />
0.03<br />
0.02<br />
0.01<br />
0<br />
-0.01<br />
-0.02<br />
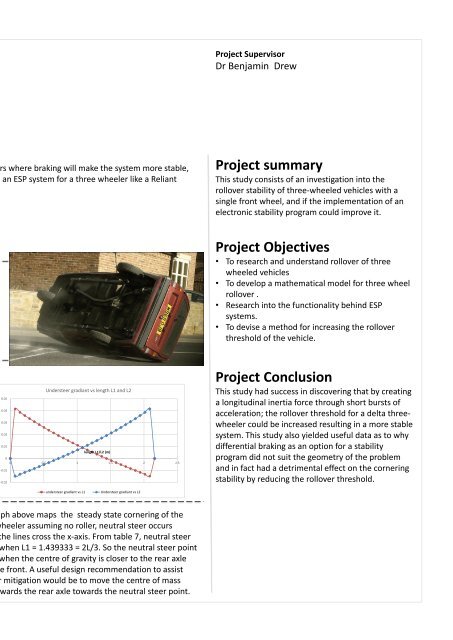
Understeer gradiant vs length L1 and L2<br />
length L1/L2 (m)<br />
0 0.5 1 1.5 2 2.5<br />
Project Conclusion<br />
This study had success in discovering that by creating<br />
a longitudinal inertia force through short bursts of<br />
acceleration; the rollover threshold for a delta threewheeler<br />
could be increased resulting in a more stable<br />
system. This study also yielded useful data as to why<br />
differential braking as an option for a stability<br />
program did not suit the geometry of the problem<br />
and in fact had a detrimental effect on the cornering<br />
stability by reducing the rollover threshold.<br />
understeer gradiant vs L1<br />
Understeer gradiant vs L2<br />
The graph above maps the steady state cornering of the<br />
three wheeler assuming no roller, neutral steer occurs<br />
where the lines cross the x-axis. From table 7, neutral steer<br />
occurs when L1 = 1.439333 = 2L/3. So the neutral steer point<br />
occurs when the centre of gravity is closer to the rear axle<br />
then the front. A useful design recommendation to assist<br />
rollover mitigation would be to move the centre of mass<br />
back towards the rear axle towards the neutral steer point.