

UWE Bristol Engineering showcase 2015

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Design Model & Simulation<br />
The design model and simulation<br />
will take part within MATLAB and<br />
Simulink. Written code and<br />
Simulink models will emulate a<br />
guidance, navigation and control<br />
system once developed.<br />
Abigail Glover<br />
Aerospace Systems <strong>Engineering</strong><br />
Undergraduate Final Year Project (MEng A)<br />
Investigation and Development of Control and Communications<br />
Systems of UAVs for use within Precision Agriculture<br />
Background<br />
The use of advanced control and autonomous systems are, at present, a major part of our society to and their uses are ever becoming<br />
ever increasingly important. Unmanned Aerial Vehicles (UAVs) and other Unmanned Vehicle Systems have been a large focus mainly<br />
within Aerospace and Military Defence, but now the possible roles and capabilities for unmanned autonomous systems, are majorly<br />
advancing within the civil and commercial sectors. Applications offered are as such: mapping, surveillance, scientific data gathering,<br />
search and tracking operations (such as forest fire monitoring) and as for the focus area for this project, Precision Agriculture.<br />
AN IDEAL SYSTEM<br />
The ideal autonomous Guidance, Navigation and Control (GNC) system,<br />
would enable a vehicle to autonomously follow and track, a specified<br />
path, in the case of a UAV this would be to maintain a desired altitude<br />
and heading without exceeding the constraints set for the system for the<br />
desired tasks that may be required from it – depending on its use,<br />
whether this is for surveillance of crops for example or surveillance of an<br />
specific area that may wish to be examined.<br />
Aircraft Model<br />
Calculating coefficients and<br />
motions of the UAV, including all<br />
of the Aerodynamic equations<br />
and calculations for forces and<br />
motion, Rotations Matrices,<br />
Velocities, Positions, Euler and<br />
Angular calculations that occur<br />
during the Simulation to output<br />
results from the desired aircraft.<br />
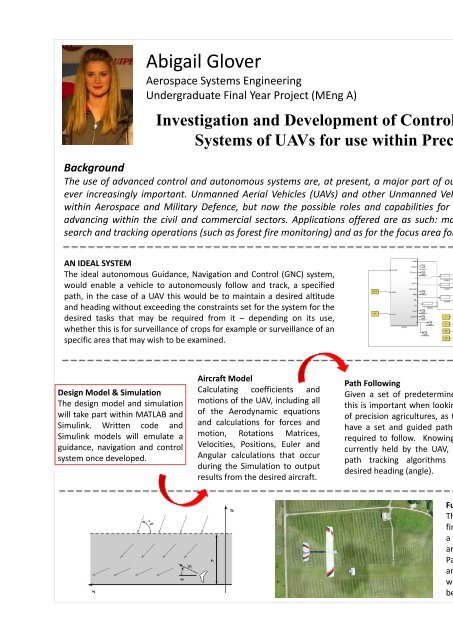
Path Following<br />
Given a set of predetermined waypoints,<br />
this is important when looking at the field<br />
of precision agricultures, as the UAVs may<br />
have a set and guided path that may be<br />
required to follow. Knowing the position<br />
currently held by the UAV, will allow for<br />
path tracking algorithms to give the<br />
desired heading (angle).<br />
Autopilot<br />
A controller will allow the UAV<br />
to following a particular<br />
heading, and hold an altitude<br />
– a steady and smooth flight is<br />
always the desired outcome<br />
from a system, and along with<br />
the path tracking being able to<br />
hold an altitude will be an<br />
important step towards this<br />
Further Development<br />
The system is currently still in development from the<br />
first year of the project and will need more time to be<br />
a fully working system. The next steps of development<br />
are to finish the Autopilot system and build upon the<br />
Path Following routines, to think about implementing<br />
an IMU and wind turbulence systems. Implementation<br />
with the Flightgear or XPlane interface will allow for<br />
better analysis of the system.<br />
Project Supervisor<br />
Dr. Pritesh Narayan<br />
Project summary<br />
The primary aim of the investigation is to<br />
design and develop a Control system for a<br />
UAV, which can be developed into a system<br />
that multiple UAVs can use and work<br />
cooperatively together. These will be capable<br />
to perform tasks such as surveillance within<br />
Agricultural production. Some of the ideas<br />
will be an extension of a number of previous<br />
publications, where work on UAVs and<br />
Unmanned Autonomous systems have been<br />
developing over the last decade. The project<br />
proposes to explore wider ideas and<br />
opportunities to present possible solutions<br />
for methods of use of UAVs and unmanned<br />
vehicle systems together in agriculture.<br />
Project Objectives<br />
(MEng A Project Scope)<br />
• Investigate required specifications and<br />
explore the limitations of UAVs and other<br />
vehicles alike that can be used for Precision<br />
Agriculture.<br />
• Investigate current methods for navigation,<br />
guidance and control of UAVs and explore<br />
how these can be developed into use in<br />
project area.<br />
• Design a prototype UAV Control system<br />
(Guidance, Navigation and Control).<br />
• Development of a prototype UAV Control<br />
system using MATLAB/Simulink.<br />
Project Conclusion<br />
The project is still in development although<br />
prototype systems are currently designed and<br />
being developed. All research objectives were<br />
completed. Further development of the<br />
systems are required.