

UWE Bristol Engineering showcase 2015

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Matt Huxford<br />
BEng Robotics<br />
Project Supervisor<br />
Abdul Farooq<br />
Investigation into Machine Vision Based Object Measurement<br />
Introduction<br />
Machine vison techniques are useful for<br />
automating tasks that would normally require<br />
human involvement. Using a machine vison system<br />
can reduce the time the task takes. Machine vision<br />
can remove human involvement therefore<br />
reducing risk of human error. This also allows the<br />
human to do other tasks. In some cases machine<br />
vison can increase the accuracy and quality of the<br />
task..<br />
I purpose a machine vision system that measures<br />
objects placed on a tabletop. The system will<br />
measure objects quickly and autonomously.<br />
CAD Renderings of Design<br />
Prototype System Photos<br />
Below is a picture of the measurement system The<br />
base is a mat white surface that gives a uniform<br />
background that can be removed using machine<br />
vison.<br />
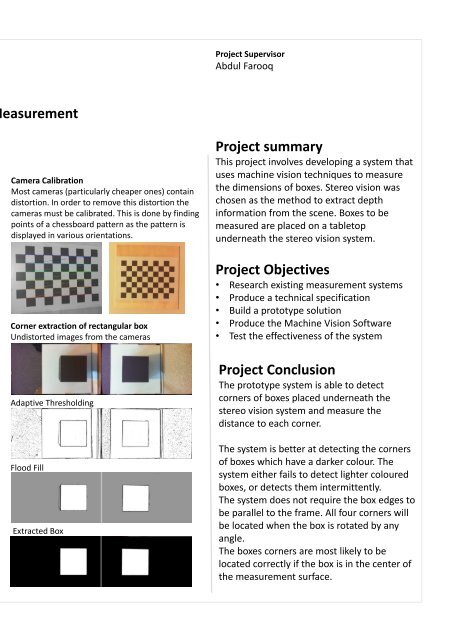
Camera Calibration<br />
Most cameras (particularly cheaper ones) contain<br />
distortion. In order to remove this distortion the<br />
cameras must be calibrated. This is done by finding<br />
points of a chessboard pattern as the pattern is<br />
displayed in various orientations.<br />
Corner extraction of rectangular box<br />
Undistorted images from the cameras<br />
Project summary<br />
This project involves developing a system that<br />
uses machine vision techniques to measure<br />
the dimensions of boxes. Stereo vision was<br />
chosen as the method to extract depth<br />
information from the scene. Boxes to be<br />
measured are placed on a tabletop<br />
underneath the stereo vision system.<br />
Project Objectives<br />
• Research existing measurement systems<br />
• Produce a technical specification<br />
• Build a prototype solution<br />
• Produce the Machine Vision Software<br />
• Test the effectiveness of the system<br />
Adaptive Thresholding<br />
Project Conclusion<br />
The prototype system is able to detect<br />
corners of boxes placed underneath the<br />
stereo vision system and measure the<br />
distance to each corner.<br />
The images below show the stereo vision system.<br />
The orientation of the cameras can be slightly<br />
altered. This allows the position of the cameras to<br />
be adjusted to be parallel with each other.<br />
Flood Fill<br />
Extracted Box<br />
The system is better at detecting the corners<br />
of boxes which have a darker colour. The<br />
system either fails to detect lighter coloured<br />
boxes, or detects them intermittently.<br />
The system does not require the box edges to<br />
be parallel to the frame. All four corners will<br />
be located when the box is rotated by any<br />
angle.<br />
The boxes corners are most likely to be<br />
located correctly if the box is in the center of<br />
the measurement surface.