

UWE Bristol Engineering showcase 2015

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Abigail Dalby<br />
MEng Aerospace <strong>Engineering</strong> (Systems)<br />
Project Supervisor<br />
Pritesh Narayan<br />
Extending the Range of a Unmanned Aerial Vehicle (UAV) without the<br />
use of a Satellite<br />
Satellites are primarily used because of the range that can be achieved, allowing communication with the vehicle from the other side of<br />
the world. The main disadvantage being the cost of setting up a satellite system and maintaining the satellite system, this can cause a<br />
few hours use of the satellite to cost thousands of pounds. High network latency due to the distance the data has to travel is also a<br />
problem and also the need for specialised satellite terminals to communicate with the satellite.<br />
The original idea for this project came from using the mobile network to control<br />
the UAV. One of the most widely available networks is the mobile network; this<br />
can be access in most countries around the world. Originally developed primarily<br />
for transmitting voice (1G) currently includes 2G EDGE & GPRS, 3G and 4G. Each<br />
standard provides different bandwidths and ranges. This idea was extended to<br />
include WIFI as a way to improve the bandwidth.<br />
System Design<br />
The system design is based on UK<br />
regulation and research into<br />
communication bandwidths. The<br />
communications methods chosen<br />
were WIFI, mobile network work<br />
and creating a fully autonomous<br />
system for when the UAV is<br />
outside communications range.<br />
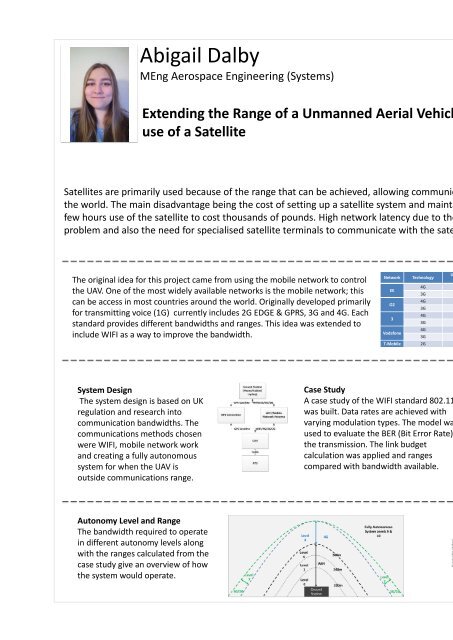
Autonomy Level and Range<br />
The bandwidth required to operate<br />
in different autonomy levels along<br />
with the ranges calculated from the<br />
case study give an overview of how<br />
the system would operate.<br />
Network<br />
Technology<br />
Case Study<br />
A case study of the WIFI standard 802.11g<br />
was built. Data rates are achieved with<br />
varying modulation types. The model was<br />
used to evaluate the BER (Bit Error Rate) of<br />
the transmission. The link budget<br />
calculation was applied and ranges<br />
compared with bandwidth available.<br />
Upload Speed<br />
(Mbps)<br />
Download Speed<br />
(Mbps)<br />
EE<br />
4G 3.1 9.2<br />
3G 0.4 2.5<br />
O2<br />
4G 3.6 9.8<br />
3G 0.4 2<br />
3<br />
4G 5.2 8.4<br />
3G 0.7 3.4<br />
Vodafone<br />
4G 2.2 11.2<br />
3G 0.3 2.2<br />
T-Mobile 2G 0.236 0.236<br />
Bandwidth (Mbps)<br />
60<br />
50<br />
40<br />
30<br />
20<br />
10<br />
0<br />
Physical<br />
Layer<br />
ERP-<br />
DSSS<br />
ERP-<br />
OFDM<br />
ERP-<br />
PBCC<br />
DSSS-<br />
OFDM<br />
Range vs Bandwidth<br />
Range (m)<br />
Use<br />
Data Rate (Mbps)<br />
Mandatory 1, 2, 5.5, 11<br />
Mandatory 6, 9, 12, 18, 24, 36, 48, 54<br />
Optional 1, 2, 5.5, 11, 22, 33<br />
Optional 6, 9, 12, 18, 24, 36, 48, 54<br />
Project summary<br />
The main aim of this project is to design a<br />
system that can extend the range of the UAV<br />
without the use of a satellite. It will primarily<br />
focused on the communication between the<br />
UAV and the operator. This project<br />
investigates the advantages and<br />
disadvantages of using wireless existing<br />
infrastructures (for example the mobile<br />
network), building a new infrastructure and<br />
using autonomous flight to allow the UAV to<br />
travel beyond the range of the operator.<br />
Project Objectives<br />
• Research regulations around flying a UAV<br />
in up airspace and investigate the impact<br />
this will have on the design of the system.<br />
• Select a method for implementing<br />
different autonomy levels and the data<br />
rates required for each mode.<br />
• Produce a case study proving the<br />
feasibility of the different communication<br />
methods for between the ground station<br />
and the UAV.<br />
Project Conclusion<br />
• The project was proven to be feasible<br />
however much more work is needed on<br />
the hardware side.<br />
• All of the numbers are theoretical and<br />
therefore need to be proven to be close to<br />
real world values.<br />
• A combination of 4 layer of autonomy will<br />
be needed to achieve the maximum range.