antriebstechnik 10/2019
antriebstechnik 10/2019
antriebstechnik 10/2019
- TAGS
- antriebstechnik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
FORSCHUNG UND ENTWICKLUNG<br />
ausführen. Intime stellt Entwicklungs-Tools bereit<br />
mithilfe derer Apps mit Microsoft Visual Studio in C<br />
oder C++ entwickelt werden können. Die Echtzeitfähigkeit<br />
der Apps lässt sich mithilfe des Thread-<br />
Analyse-Tools INScope vorab analysieren. Die Entwicklung<br />
einer dem Stand der Technik entsprechenden<br />
Steuerungsapplikation erfordert Mannjahrzehnte<br />
an Entwicklungsaufwand, weshalb hierfür<br />
auf den CNC-Kern der Industriellen Steuerungstechnik<br />
GmbH (ISG) gesetzt wird. Dies entspricht<br />
demselben Kern, der auch von Kuka als Kuka.CNC<br />
vertrieben und oftmals für Bearbeitungsaufgaben<br />
eingesetzt wird. Dessen Initialisierung erfolgt über<br />
Listen, die als Parametrierdateien (.lis-Files) abliegen<br />
und beim Hochlauf ausgelesen werden. Darin<br />
sind u. a. Parameter für die Bahnplanung sowie zur<br />
Berechnung von Vor- und Rückwärtstransformation<br />
abgespeichert. Der CNC-Kern kommuniziert über<br />
einen weiteren Shared Memory mit einem als App<br />
vorliegenden Sercos III SoftMaster, welcher die Sollwerte<br />
für die Achsregelung über den Feldbus an die<br />
Frequenzumrichter weiterreicht. Auf diese Weise<br />
kann auf einen Hardware-Master verzichtet werden.<br />
Stattdessen lässt sich ein preiswerter Ethernet-Controller (z. B.<br />
Intel I2<strong>10</strong>) einsetzten, während die Servos III Treiberfunktionalität<br />
vom Softmaster emuliert wird.<br />
ALTERNATIVE BAHNPLANUNGS- UND<br />
REGELUNGSALGORITHMEN<br />
Auf den Umrichtern ist standardmäßig eine konventionelle Kaskadenregelung<br />
implementiert. Zur Untersuchung alternativer Antriebsregelungsalgorithmen<br />
muss die Kaskadenregelung jedoch<br />
ersetzt oder erweitert werden. Dies ist auf den Umrichtern von<br />
Herstellerseite so nicht vorgesehen und daher technologisch nur<br />
eingeschränkt möglich. Allerdings bietet die hier vorgestellte offene<br />
Steuerungsplattform die Möglichkeit die äußeren Regelkreise<br />
(Lage- und Geschwindigkeitsregelung) als App auf dem Echtzeitbetriebssystem<br />
auszuführen und lediglich die unterlagerte Stromregelung<br />
auf Umrichterseite zu belassen. Hierzu stellt der Soft-<br />
Master einerseits der Antriebsregler-App die erforderlichen<br />
Geberwerte zur Verfügung und andererseits den Umrichtern die<br />
notwendigen Sollwerte für die Stromregelung. Damit lässt sich<br />
bspw. auch eine direkte Lageregelung umsetzen, die im Werkzeugmaschinenbereich<br />
etabliert ist, bei Robotern allerdings noch keine<br />
weite Verbreitung genießt. Dies ist ein weiteres Beispiel dafür, dass<br />
IR bis heute stark von den klassischen Einsatzbereichen geprägt<br />
sind. Gleichwohl kann durch die direkte Lageregelung insbesondere<br />
für die Fräsbearbeitung eine erhebliche Genauigkeitssteigerung<br />
erzielt werden. Die dazu notwendigen, auf der Getriebeabtriebsseite<br />
der Gelenkachsen zu integrierenden, Geber wurden vom ISW<br />
bereits nachgerüstet.<br />
Über die hier vorgestellte Architektur ist es außerdem möglich,<br />
alle über den Feldbus kommunizierte Daten aufzuzeichnen und als<br />
Messdaten auf der Festplatte abzulegen (Messdaten-Logger). Dies<br />
ist bspw. notwendig, um die erzielte Genauigkeitssteigerung quantitativ<br />
bewerten zu können. Außerdem liegt eine Sollwerterzeuger-<br />
App vor, welche vom CNC-Kern nicht generierbare Testprofile, wie<br />
ideale Sollwertsprünge oder Sinus-Sweeps, vorgeben kann. Hiermit<br />
können in der Systemtheorie übliche Bewertungsgraphen (z. B.<br />
Sprungantworten oder Bode-Diagramme) erzeugt werden.<br />
BEISPIELHAFTE FUNKTIONSERWEITERUNGEN<br />
Da zu Forschungszwecken im universitären Umfeld die Regelungen<br />
an den Stabilitätsrand getrieben werden, wurde ergänzend zu<br />
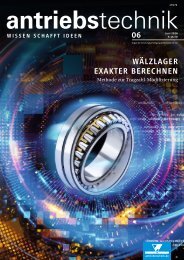
Windows <strong>10</strong><br />
Echtzeitbetriebssystem<br />
Hardware<br />
Digitaler<br />
Zwilling<br />
Parametrierdateien<br />
02 Offene Steuerungsarchitektur des Industrieroboters<br />
CNC-<br />
Kern<br />
Sercos 3<br />
Shared Memory<br />
Sercos 3<br />
Softmaster<br />
Sollwerterzeuger<br />
Antriebsregler<br />
Safety-<br />
Monitor<br />
Shared Memory<br />
Mess-<br />
daten-<br />
Logger<br />
den Sicherheitsfunktionalitäten von Kern und Umrichter ein<br />
Safety-Monitor entwickelt, mit welchem u. a. der TCP im<br />
kartesischen Arbeitsraum online überwacht wird. Außerdem<br />
lassen sich programmierte Trajektorien gefahrlos mithilfe eines<br />
digitalen Zwillings simulativ testen. Hierfür wird ein ISG Virtuos<br />
Modell eingesetzt.<br />
Zusammengefasst ermöglicht die vom ISW entwickelte offene<br />
und erweiterbare Steuerungsplattform die forschungstechnische<br />
Untersuchung alternativer Bahnplanungs- und Regelungsalgorithmen.<br />
Für Anwender aus dem industriellen Umfeld ist die<br />
Steuerungsplattform ebenfalls interessant, sofern das Einsatzgebiet<br />
des Roboters die Bearbeitung darstellt oder ganz allgemein<br />
Funktionalitäten gebraucht werden, die herstellerseitig nicht mitgeliefert<br />
werden.<br />
DIE AUTOREN<br />
Michael Neubauer, M.Sc.,<br />
Gruppenleiter,<br />
ISW Universität Stuttgart<br />
Patrick Mesmer, M.Sc.,<br />
Wissenschaftlicher<br />
Mitarbeiter,<br />
ISW Universität Stuttgart<br />
GUI<br />
www.<strong>antriebstechnik</strong>.de <strong>antriebstechnik</strong> <strong>2019</strong>/<strong>10</strong> 97<br />
…<br />
Messdaten<br />
Prof. Dr.-Ing. Alexander Verl,<br />
Institutsleiter,<br />
ISW Universität Stuttgart<br />
Dr.-Ing. Armin Lechler,<br />
Stellvertretender<br />
Institutsleiter,<br />
ISW Universität Stuttgart