fundamentals of engineering supplied-reference handbook - Ventech!
fundamentals of engineering supplied-reference handbook - Ventech!
fundamentals of engineering supplied-reference handbook - Ventech!

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
27<br />
y<br />
y<br />
y<br />
y<br />
y<br />
a<br />
C<br />
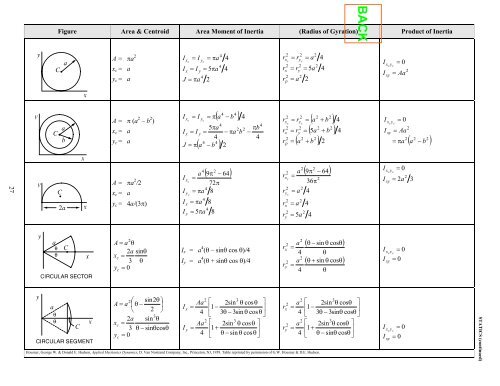
Figure Area & Centroid Area Moment <strong>of</strong> Inertia (Radius <strong>of</strong> Gyration) 2 Product <strong>of</strong> Inertia<br />
C a<br />
C<br />
b<br />
a<br />
2a<br />
a C<br />
C<br />
x<br />
x<br />
x<br />
x<br />
x<br />
A = πa 2<br />
I xc = I yc<br />
= πa<br />
xc = a<br />
I x = I y = 5πa<br />
yc = a 4<br />
J = πa<br />
2<br />
A = π (a 2 – b 2 )<br />
xc = a<br />
yc = a<br />
A = πa 2 /2<br />
xc = a<br />
yc = 4a/(3π)<br />
2<br />
A = a θ<br />
2a<br />
sinθ<br />
xc<br />
=<br />
3 θ<br />
y = 0<br />
c<br />
2⎛<br />
sin2θ<br />
⎞<br />
A = a ⎜θ<br />
− ⎟<br />
⎝ 2 ⎠<br />
3<br />
2a<br />
sin θ<br />
xc<br />
=<br />
3 θ − sinθcosθ<br />
y = 0<br />
c<br />
4<br />
4<br />
I x = I y = π<br />
c c<br />
5πa<br />
I x = I y =<br />
4<br />
J = π<br />
I<br />
I<br />
I<br />
I<br />
xc<br />
yc<br />
x<br />
y<br />
4<br />
4<br />
4 4 ( a − b ) 2<br />
4<br />
4 4 ( a − b )<br />
4<br />
2 ( 9π<br />
− 64)<br />
a<br />
=<br />
72π<br />
4<br />
= πa<br />
8<br />
4<br />
= πa<br />
8<br />
4<br />
= 5πa<br />
8<br />
4<br />
2 2 πb<br />
− πa<br />
b −<br />
4<br />
Ix = a 4 (θ – sinθ cos θ)/4<br />
Iy = a 4 (θ + sinθ cos θ)/4<br />
I<br />
I<br />
x<br />
y<br />
Aa<br />
=<br />
4<br />
Aa<br />
=<br />
4<br />
2<br />
2<br />
⎡<br />
3<br />
2sin<br />
θ cosθ<br />
⎤<br />
⎢1<br />
−<br />
⎥<br />
⎣ 3θ<br />
− 3sin<br />
θ cosθ<br />
⎦<br />
⎡ 3<br />
2sin<br />
θ cosθ<br />
⎤<br />
⎢1<br />
+<br />
⎥<br />
⎣ θ − sin θ cosθ<br />
⎦<br />
4<br />
2 2<br />
x = r<br />
c yc<br />
2 2<br />
x = ry<br />
2 2<br />
p = a<br />
r<br />
r<br />
r<br />
2<br />
x =<br />
c c<br />
2<br />
x =<br />
2<br />
p =<br />
r<br />
r<br />
r<br />
2<br />
x<br />
r<br />
2<br />
yc<br />
2<br />
x<br />
2<br />
y<br />
r<br />
r<br />
r<br />
c<br />
2<br />
x<br />
r<br />
2<br />
y<br />
r<br />
2<br />
y<br />
2<br />
= a<br />
= 5a<br />
2<br />
2<br />
4<br />
4<br />
2 2 2<br />
ry<br />
= ( a + b )<br />
2 2 2<br />
ry<br />
= ( 5a<br />
+ b )<br />
2 2 ( a + b ) 2<br />
a<br />
=<br />
= a<br />
2<br />
2<br />
2<br />
= a 4<br />
2<br />
= 5a<br />
4<br />
a<br />
=<br />
2<br />
4 2<br />
a<br />
=<br />
4<br />
2 ( 9π<br />
− 64)<br />
Housner, George W. & Donald E. Hudson, Applied Mechanics Dynamics, D. Van Nostrand Company, Inc., Princeton, NJ, 1959. Table reprinted by permission <strong>of</strong> G.W. Housner & D.E. Hudson.<br />
2<br />
x<br />
r<br />
r<br />
36π<br />
4<br />
2<br />
4<br />
4<br />
( θ − sin θ cosθ)<br />
θ<br />
( θ + sin θ cosθ)<br />
θ<br />
2 ⎡<br />
3<br />
a 2sin<br />
θ cosθ<br />
⎤<br />
= ⎢1<br />
−<br />
⎥<br />
4 ⎣ 3θ<br />
− 3sinθ<br />
cosθ⎦<br />
2 ⎡<br />
3<br />
a 2sin<br />
θ cosθ<br />
⎤<br />
= ⎢1<br />
+<br />
⎥<br />
4 ⎣ θ − sinθ<br />
cosθ⎦<br />
I<br />
I<br />
xc yc<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
I<br />
xy<br />
xy<br />
= 0<br />
= Aa<br />
2<br />
y = 0<br />
= Aa<br />
2<br />
= πa<br />
xc c<br />
xc yc<br />
xy<br />
xc<br />
y<br />
xy<br />
xc<br />
y<br />
xy<br />
= 0<br />
= 2a<br />
2<br />
= 0<br />
c<br />
= 0<br />
= 0<br />
c<br />
= 0<br />
2<br />
2 2 ( a − b )<br />
3<br />
STATICS (continued)