fundamentals of engineering supplied-reference handbook - Ventech!
fundamentals of engineering supplied-reference handbook - Ventech!
fundamentals of engineering supplied-reference handbook - Ventech!

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
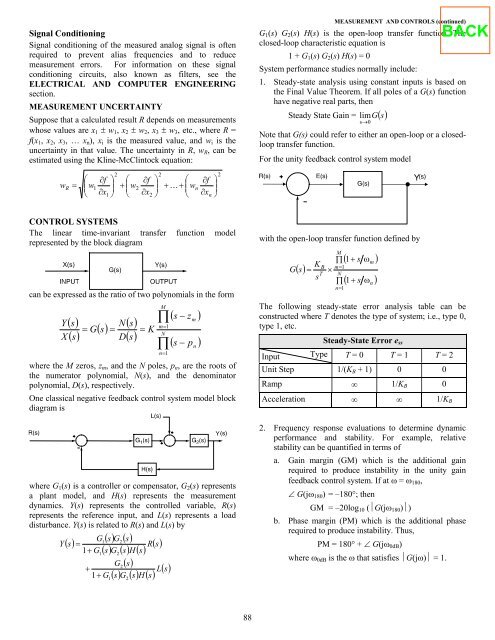
Signal Conditioning<br />
Signal conditioning <strong>of</strong> the measured analog signal is <strong>of</strong>ten<br />
required to prevent alias frequencies and to reduce<br />
measurement errors. For information on these signal<br />
conditioning circuits, also known as filters, see the<br />
ELECTRICAL AND COMPUTER ENGINEERING<br />
section.<br />
MEASUREMENT UNCERTAINTY<br />
Suppose that a calculated result R depends on measurements<br />
whose values are x1 ± w1, x2 ± w2, x3 ± w3, etc., where R =<br />
f(x1, x2, x3, … xn), xi is the measured value, and wi is the<br />
uncertainty in that value. The uncertainty in R, wR, can be<br />
estimated using the Kline-McClintock equation:<br />
2<br />
2<br />
2<br />
1 2<br />
⎟<br />
1<br />
2<br />
⎟<br />
∂f<br />
⎞ ⎛ ∂f<br />
⎞ ⎛ ∂f<br />
⎞<br />
⎟ +<br />
⎜ w<br />
⎟ + + ⎜<br />
∂ ∂ ⎜<br />
wn<br />
x x<br />
∂xn<br />
⎛<br />
wR =<br />
⎜ w<br />
…<br />
⎝ ⎠ ⎝ ⎠<br />
CONTROL SYSTEMS<br />
The linear time-invariant transfer function model<br />
represented by the block diagram<br />
X(s)<br />
can be expressed as the ratio <strong>of</strong> two polynomials in the form<br />
Y<br />
X<br />
() s<br />
() s<br />
() s<br />
() s<br />
M<br />
∏<br />
N<br />
= G()<br />
s = = K N<br />
D<br />
m=<br />
1<br />
∏<br />
n=<br />
1<br />
⎝<br />
( s − z )<br />
m<br />
( s − p )<br />
where the M zeros, zm, and the N poles, pn, are the roots <strong>of</strong><br />
the numerator polynomial, N(s), and the denominator<br />
polynomial, D(s), respectively.<br />
One classical negative feedback control system model block<br />
diagram is<br />
where G1(s) is a controller or compensator, G2(s) represents<br />
a plant model, and H(s) represents the measurement<br />
dynamics. Y(s) represents the controlled variable, R(s)<br />
represents the <strong>reference</strong> input, and L(s) represents a load<br />
disturbance. Y(s) is related to R(s) and L(s) by<br />
G1<br />
()<br />
() s G2()<br />
s<br />
Y s =<br />
R()<br />
s<br />
1+<br />
G s G s H s<br />
1<br />
+<br />
1+<br />
G(s)<br />
() 2()<br />
()<br />
G2()<br />
s<br />
G () s G () s H () s<br />
1<br />
2<br />
Y(s)<br />
L<br />
() s<br />
n<br />
⎠<br />
Y<br />
88<br />
MEASUREMENT AND CONTROLS (continued)<br />
G1(s) G2(s) H(s) is the open-loop transfer function. The<br />
closed-loop characteristic equation is<br />
1 + G1(s) G2(s) H(s) = 0<br />
System performance studies normally include:<br />
1. Steady-state analysis using constant inputs is based on<br />
the Final Value Theorem. If all poles <strong>of</strong> a G(s) function<br />
have negative real parts, then<br />
Steady State Gain = limG() s<br />
s→0<br />
Note that G(s) could refer to either an open-loop or a closedloop<br />
transfer function.<br />
For the unity feedback control system model<br />
with the open-loop transfer function defined by<br />
G<br />
() s<br />
K<br />
=<br />
s<br />
B<br />
T<br />
M<br />
( 1+<br />
s )<br />
∏ ω<br />
m=<br />
1 × N<br />
∏ ω<br />
n=<br />
1<br />
m<br />
( 1+<br />
s )<br />
The following steady-state error analysis table can be<br />
constructed where T denotes the type <strong>of</strong> system; i.e., type 0,<br />
type 1, etc.<br />
Steady-State Error ess<br />
Input Type T = 0 T = 1 T = 2<br />
Unit Step 1/(KB + 1) 0 0<br />
Ramp ∞ 1/KB 0<br />
Acceleration ∞ ∞ 1/KB<br />
2. Frequency response evaluations to determine dynamic<br />
performance and stability. For example, relative<br />
stability can be quantified in terms <strong>of</strong><br />
a. Gain margin (GM) which is the additional gain<br />
required to produce instability in the unity gain<br />
feedback control system. If at ω = ω180,<br />
∠ G(jω180) = –180°; then<br />
GM = –20log10 (⏐G(jω180)⏐)<br />
b. Phase margin (PM) which is the additional phase<br />
required to produce instability. Thus,<br />
PM = 180° + ∠ G(jω0dB)<br />
where ω0dB is the ω that satisfies ⏐G(jω)⏐ = 1.<br />
n<br />
Y