NUI Galway – UL Alliance First Annual ENGINEERING AND - ARAN ...
NUI Galway – UL Alliance First Annual ENGINEERING AND - ARAN ...
NUI Galway – UL Alliance First Annual ENGINEERING AND - ARAN ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Eigen-based Approach for Leverage Parameter<br />
Identification in System Dynamics<br />
Abstract—Eigen-based approaches are useful tools in analyzing<br />
dynamic systems. They can be used to identify the leverage<br />
points that drive the observed behaviour. The structure under<br />
investigation is system parameter. This work distracts from the<br />
traditional focus on the eigenvalue to the behaviour mode weight.<br />
It is known that not only the behaviour mode (e λt ), but also the<br />
weight influences the state behaviour. Further investigation finds<br />
the weight can be decomposed into eigenvectors and system initial<br />
condition. An analytical methodology to compute the weight<br />
elasticity over the parameter is proposed here. An experiment<br />
on the labour-inventory model is performed to both validate the<br />
methodology and render the implications for policy design.<br />
Index Terms—leverage points identification, parameter analysis,<br />
numerical weight analysis<br />
I. Introduction<br />
System dynamics (SD) is a computer-aided approach to<br />
policy analysis and design. The heart of SD lies at exploring<br />
the rule of “structure drives behaviour”. SD approaches have<br />
a series benefits:<br />
1) grasp counterintuitive behaviors;<br />
2) tell a “system story” about policy outcomes, and highlight<br />
the potential leverage points;<br />
3) simplify system archetypes.<br />
Eigen-based approaches including eigenvalues and eigenvector<br />
analysis are widely used in the SD research (see [1]). Eigenvector<br />
analysis has started to attract more attention recently. [2]<br />
first proposed its application in identifying dominant feedback<br />
loops. A numerical weight analysis was carried out by [3] to<br />
show the leverage structure points.<br />
II. Methodologyofweightanalysis<br />
We propose an analytical methodology of weight analysis<br />
with respect to the system parameters. It is carried out in the<br />
following steps.<br />
1) For an n-order system, the behavior of the state variable<br />
xi is expressed by Eq. (1).<br />
xi(t)=e tλ1 r1iℓ H<br />
1 x(0)<br />
+etλ2 r2iℓ H<br />
2 x(0)<br />
Jinjing Huang, Enda Howley and Jim Duggan<br />
+...+ etλn rniℓ H<br />
n x(0)<br />
(1)<br />
where t is time,λis eigenvalue, r andℓare right and<br />
left eigenvectors, and x(0) is system initial conditions.<br />
The term under brace is weight.<br />
2) Computing the weight elasticity (ε) with respect to a<br />
parameter p in Eq. (2).<br />
j X0<br />
<br />
ε w ∂w ji/w ji<br />
ji =<br />
∂p/p =∂ r jiℓH p<br />
∂p w ji<br />
⎛<br />
= ⎜⎝ ∂r ji<br />
∂p ℓHj<br />
+ r ∂ℓ<br />
ji<br />
H⎞<br />
j<br />
⎟⎠ X0∗<br />
∂p<br />
p<br />
w ji<br />
(2)<br />
153<br />
3) The weight elasticity is decomposed into the calculation<br />
of eigenvector sensitivity over the parameter:<br />
∂r ji/∂p,∂ℓ H<br />
j /∂p, which is solved by [4].<br />
III. Experiment Results<br />
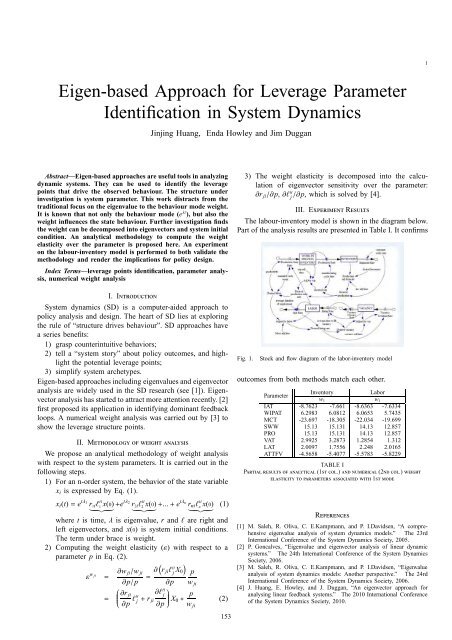
The labour-inventory model is shown in the diagram below.<br />
Part of the analysis results are presented in Table I. It confirms<br />
Fig. 1. Stock and flow diagram of the labor-inventory model<br />
outcomes from both methods match each other.<br />
Parameter<br />
Inventory Labor<br />
w1<br />
IAT -8.7623 -7.661 -8.6363 -7.6334<br />
WIPAT 6.2983 6.0812 6.0653 5.7435<br />
MCT -23.697 -18.305 -22.034 -19.699<br />
SWW 15.13 15.131 14.13 12.857<br />
PRO 15.13 15.131 14.13 12.857<br />
VAT 2.9925 3.2873 1.2854 1.312<br />
LAT 2.0097 1.7556 2.248 2.0165<br />
ATTFV -4.5658 -5.4077 -5.5783 -5.8229<br />
TABLE I<br />
Partialresultsofanalytical (1stcol.)andnumerical (2ndcol.)weight<br />
elasticitytoparametersassociatedwith 1stmode<br />
References<br />
[1] M. Saleh, R. Oliva, C. E.Kampmann, and P. I.Davidsen, “A comprehensive<br />
eigenvalue analysis of system dynamics models.” The 23rd<br />
International Conference of the System Dynamics Society, 2005.<br />
[2] P. Goncalves, “Eigenvalue and eigenvector analysis of linear dynamic<br />
systems.” The 24th International Conference of the System Dynamics<br />
Society, 2006.<br />
[3] M. Saleh, R. Oliva, C. E.Kampmann, and P. I.Davidsen, “Eigenvalue<br />
analysis of system dynamics models: Another perspective.” The 24rd<br />
International Conference of the System Dynamics Society, 2006.<br />
[4] J. Huang, E. Howley, and J. Duggan, “An eigenvector approach for<br />
analysing linear feedback systems.” The 2010 International Conference<br />
of the System Dynamics Society, 2010.<br />
w1<br />
1