NUI Galway – UL Alliance First Annual ENGINEERING AND - ARAN ...
NUI Galway – UL Alliance First Annual ENGINEERING AND - ARAN ...
NUI Galway – UL Alliance First Annual ENGINEERING AND - ARAN ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Evolutionary Modelling of Industrial Systems<br />
with Genetic Programming<br />
Dr Birkan Can, Dr Cathal Heavey<br />
Enterprise Research Centre University of Limerick<br />
birkan.can@ul.ie, cathal.heavey@ul.ie<br />
Abstract<br />
To manage today’s industrial systems, often predictive<br />
models are required to weigh options and determine<br />
potential changes which provide the best outcome for a<br />
purpose. In this research, we investigate genetic<br />
programming to develop tangible analytic models of<br />
system performance dependent on decision variables to<br />
support decision making<br />
1. Introduction<br />
Management of complex systems, such as in<br />
semiconductor manufacturing, requires predictive<br />
models. These quantify the impact of decisions on<br />
system performance prior to changes. Companies like<br />
Seagate, Analog Devices and Intel struggle with being<br />
able to predict changes,<br />
In this respect, this research develops approximate<br />
models, metamodels, of industrial systems using genetic<br />
programming (GP) to facilitate a means to quantify the<br />
performance when the trade-off between approximation<br />
error and efficiency is appropriate.<br />
2. Predictive Models<br />
The overview of industry and relevant literature has<br />
revealed several prominent tools in application and<br />
some of their undesired characteristics.<br />
Analytical models are computationally efficient<br />
methods, however, they may require restrictive<br />
assumptions to make complex systems more tractable<br />
for modeling. Spreadsheet simulations are primarily<br />
used; but, provide low fidelity models as they do not<br />
capture the dynamics of the system. In contrast,<br />
discrete-event simulation (DES) can provide higher<br />
fidelity models; but are very difficult to develop and<br />
maintain and in many cases take too long to execute to<br />
support planning (McNally and Heavey, 2004).<br />
In the next, we summarise GP to develop explicit<br />
approximate predictive models.<br />
3. Main title<br />
GP is a branch of evolutionary algorithms which<br />
emulate the natural evolution of species. It can evolve<br />
programs of a domain via symbolic regression. These<br />
programs can be interpreted as logic instructions,<br />
analytical functions etc. GP develops the models<br />
without prior assumptions about the underlying<br />
function of the training data. These properties provide a<br />
substantial advantage for modelling of complex systems<br />
with GP. In the following, we provide the results from<br />
the analysis of application of GP in this context.<br />
155<br />
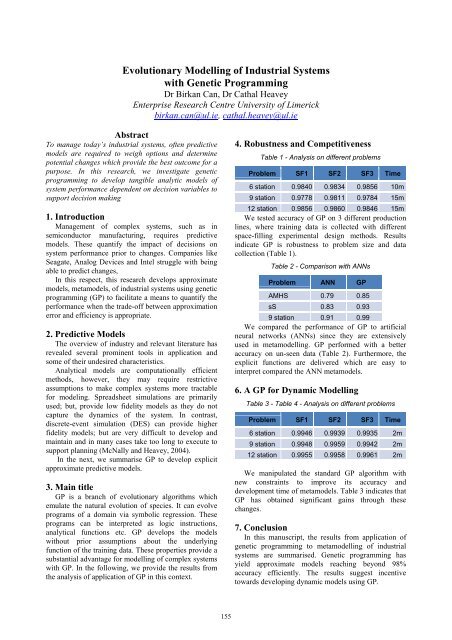
4. Robustness and Competitiveness<br />
Table 1 - Analysis on different problems<br />
Problem SF1 SF2 SF3 Time<br />
6 station 0.9840 0.9834 0.9856 10m<br />
9 station 0.9778 0.9811 0.9784 15m<br />
12 station 0.9856 0.9860 0.9846 15m<br />
We tested accuracy of GP on 3 different production<br />
lines, where training data is collected with different<br />
space-filling experimental design methods. Results<br />
indicate GP is robustness to problem size and data<br />
collection (Table 1).<br />
Table 2 - Comparison with ANNs<br />
Problem ANN GP<br />
AMHS 0.79 0.85<br />
sS 0.83 0.93<br />
9 station 0.91 0.99<br />
We compared the performance of GP to artificial<br />
neural networks (ANNs) since they are extensively<br />
used in metamodelling. GP performed with a better<br />
accuracy on un-seen data (Table 2). Furthermore, the<br />
explicit functions are delivered which are easy to<br />
interpret compared the ANN metamodels.<br />
6. A GP for Dynamic Modelling<br />
Table 3 - Table 4 - Analysis on different problems<br />
Problem SF1 SF2 SF3 Time<br />
6 station 0.9946 0.9939 0.9935 2m<br />
9 station 0.9948 0.9959 0.9942 2m<br />
12 station 0.9955 0.9958 0.9961 2m<br />
We manipulated the standard GP algorithm with<br />
new constraints to improve its accuracy and<br />
development time of metamodels. Table 3 indicates that<br />
GP has obtained significant gains through these<br />
changes.<br />
7. Conclusion<br />
In this manuscript, the results from application of<br />
genetic programming to metamodelling of industrial<br />
systems are summarised. Genetic programming has<br />
yield approximate models reaching beyond 98%<br />
accuracy efficiently. The results suggest incentive<br />
towards developing dynamic models using GP.