

5. Commands and Functions - Sanyo Denki America, Inc.
5. Commands and Functions - Sanyo Denki America, Inc.
5. Commands and Functions - Sanyo Denki America, Inc.

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
4. Input / Output Signal <strong>Functions</strong><br />
4.1.2 CN1 Input Signals<br />
1) Input Signals with Fixed <strong>Functions</strong> Allocated<br />
Signal<br />
Name<br />
STOP<br />
<strong>Functions</strong><br />
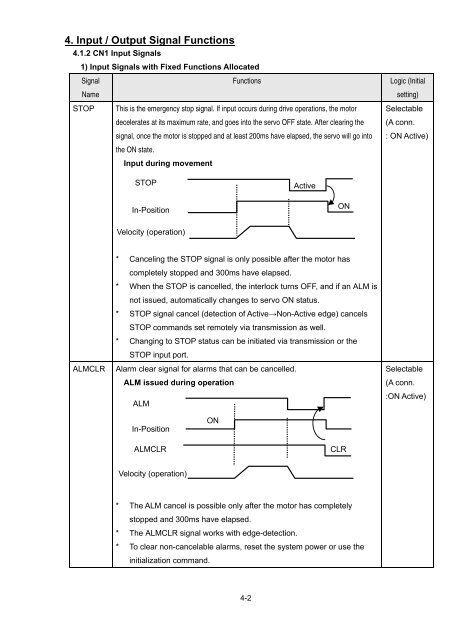
This is the emergency stop signal. If input occurs during drive operations, the motor<br />
decelerates at its maximum rate, <strong>and</strong> goes into the servo OFF state. After clearing the<br />
signal, once the motor is stopped <strong>and</strong> at least 200ms have elapsed, the servo will go into<br />
the ON state.<br />
Input during movement<br />
Logic (Initial<br />
setting)<br />
Selectable<br />
(A conn.<br />
: ON Active)<br />
STOP<br />
Active<br />
In-Position<br />
ON<br />
Velocity (operation)<br />
ALMCLR<br />
* Canceling the STOP signal is only possible after the motor has<br />
completely stopped <strong>and</strong> 300ms have elapsed.<br />
* When the STOP is cancelled, the interlock turns OFF, <strong>and</strong> if an ALM is<br />
not issued, automatically changes to servo ON status.<br />
* STOP signal cancel (detection of Active→Non-Active edge) cancels<br />
STOP comm<strong>and</strong>s set remotely via transmission as well.<br />
* Changing to STOP status can be initiated via transmission or the<br />
STOP input port.<br />
Alarm clear signal for alarms that can be cancelled.<br />
ALM issued during operation<br />
ALM<br />
Selectable<br />
(A conn.<br />
:ON Active)<br />
In-Position<br />
ON<br />
ALMCLR<br />
CLR<br />
Velocity (operation)<br />
* The ALM cancel is possible only after the motor has completely<br />
stopped <strong>and</strong> 300ms have elapsed.<br />
* The ALMCLR signal works with edge-detection.<br />
* To clear non-cancelable alarms, reset the system power or use the<br />
initialization comm<strong>and</strong>.<br />
4-2













