

5. Commands and Functions - Sanyo Denki America, Inc.
5. Commands and Functions - Sanyo Denki America, Inc.
5. Commands and Functions - Sanyo Denki America, Inc.

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>5.</strong> <strong>Comm<strong>and</strong>s</strong> <strong>and</strong> <strong>Functions</strong><br />
Push Condition<br />
Set the push movement condition. It become effective for all movement with push.<br />
Comm<strong>and</strong> Code: 37 (25h)<br />
Data Length: 1 byte<br />
Push Determination Time<br />
DAT No Function Setting range Setting unit Initial Value<br />
DAT1 Push Determination Time 0 to FFh 10msec/LSB Fh (150ms)<br />
Sets the time for completion determination for push zero-return operation <strong>and</strong> push operation. The<br />
determination time counter starts when the current limit for push set for the respective operation is<br />
reached.<br />
Comm<strong>and</strong> Code: 38 (26h)<br />
Data Length: 2 bytes<br />
Push Velocity<br />
DAT No Function Setting range Setting unit Initial Value<br />
DAT1 to 2 Push Velocity 0 to 1194h<br />
1min -1 /LSB Fh (150ms)<br />
(0 to FA0h for 86 motors)<br />
Sets the velocity for the push operation. Consider the push dynamics, such as push shock, when<br />
setting the velocity.<br />
<br />
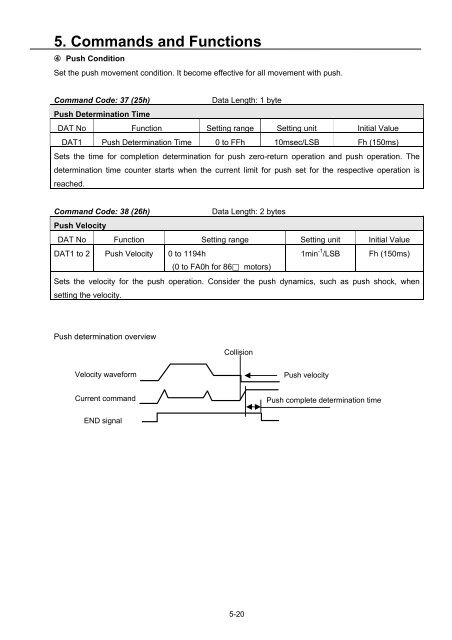
Push determination overview<br />
Collision<br />
Velocity waveform<br />
Push velocity<br />
Current comm<strong>and</strong><br />
Push complete determination time<br />
END signal<br />
5-20













