

5. Commands and Functions - Sanyo Denki America, Inc.
5. Commands and Functions - Sanyo Denki America, Inc.
5. Commands and Functions - Sanyo Denki America, Inc.

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>5.</strong> <strong>Comm<strong>and</strong>s</strong> <strong>and</strong> <strong>Functions</strong><br />
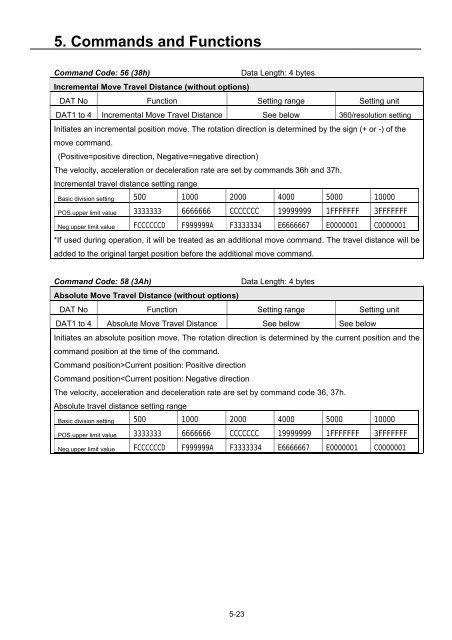
Comm<strong>and</strong> Code: 56 (38h)<br />
Data Length: 4 bytes<br />
<strong>Inc</strong>remental Move Travel Distance (without options)<br />
DAT No Function Setting range Setting unit<br />
DAT1 to 4 <strong>Inc</strong>remental Move Travel Distance See below 360/resolution setting<br />
Initiates an incremental position move. The rotation direction is determined by the sign (+ or -) of the<br />
move comm<strong>and</strong>.<br />
(Positive=positive direction, Negative=negative direction)<br />
The velocity, acceleration or deceleration rate are set by comm<strong>and</strong>s 36h <strong>and</strong> 37h.<br />
<strong>Inc</strong>remental travel distance setting range<br />
Basic division setting <br />
POS.upper limit value <br />
Neg.upper limit value <br />
*If used during operation, it will be treated as an additional move comm<strong>and</strong>. The travel distance will be<br />
added to the original target position before the additional move comm<strong>and</strong>.<br />
<br />
Comm<strong>and</strong> Code: 58 (3Ah)<br />
Data Length: 4 bytes<br />
Absolute Move Travel Distance (without options)<br />
DAT No Function Setting range Setting unit<br />
DAT1 to 4 Absolute Move Travel Distance See below See below<br />
Initiates an absolute position move. The rotation direction is determined by the current position <strong>and</strong> the<br />
comm<strong>and</strong> position at the time of the comm<strong>and</strong>.<br />
Comm<strong>and</strong> position>Current position: Positive direction<br />
Comm<strong>and</strong> position













