

5. Commands and Functions - Sanyo Denki America, Inc.
5. Commands and Functions - Sanyo Denki America, Inc.
5. Commands and Functions - Sanyo Denki America, Inc.

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4. Input / Output Signal <strong>Functions</strong><br />
4.6 Adjustments<br />
4.6.1 Comm<strong>and</strong> 21h<br />
Adjustments can be made to the proportional gain <strong>and</strong> the integral gain of the velocity loop from<br />
16 levels of normalized settings.<br />
The proportional gain is set based on the SW setting value, <strong>and</strong> increased gradually.<br />
The integral gain is selected from 3 levels.<br />
The setting values for the Gain Table are shown below:<br />
SW Setting<br />
Proportional<br />
Integral Gain<br />
SW Setting<br />
Proportional<br />
Integral Gain<br />
Value<br />
Gain<br />
Value<br />
Gain<br />
0 4 1 8 20 20<br />
1 6 10 9 22 1<br />
2 8 20 A 24 10<br />
3 10 1 B 26 20<br />
4 12 10 C 28 1<br />
5 14 20 D 30 10<br />
6 16 1 E 32 20<br />
7 18 10 F 34 1<br />
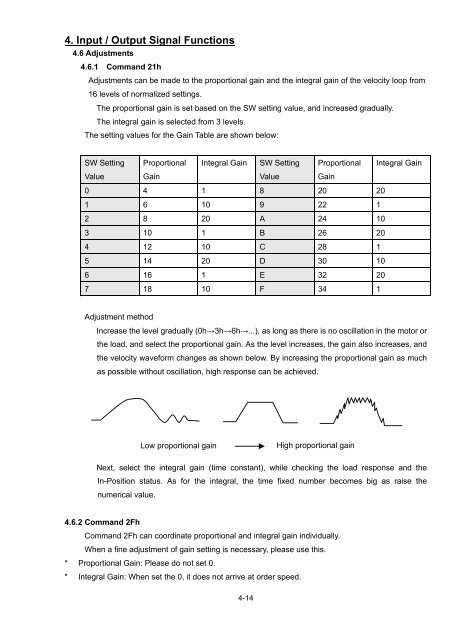
Adjustment method<br />
<strong>Inc</strong>rease the level gradually (0h→3h→6h→...), as long as there is no oscillation in the motor or<br />
the load, <strong>and</strong> select the proportional gain. As the level increases, the gain also increases, <strong>and</strong><br />
the velocity waveform changes as shown below. By increasing the proportional gain as much<br />
as possible without oscillation, high response can be achieved.<br />
Low proportional gain<br />
High proportional gain<br />
Next, select the integral gain (time constant), while checking the load response <strong>and</strong> the<br />
In-Position status. As for the integral, the time fixed number becomes big as raise the<br />
numerical value.<br />
4.6.2 Comm<strong>and</strong> 2Fh<br />
Comm<strong>and</strong> 2Fh can coordinate proportional <strong>and</strong> integral gain individually.<br />
When a fine adjustment of gain setting is necessary, please use this.<br />
* Proportional Gain: Please do not set 0.<br />
* Integral Gain: When set the 0, it does not arrive at order speed.<br />
4-14













