

5. Commands and Functions - Sanyo Denki America, Inc.
5. Commands and Functions - Sanyo Denki America, Inc.
5. Commands and Functions - Sanyo Denki America, Inc.

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>5.</strong> <strong>Comm<strong>and</strong>s</strong> <strong>and</strong> <strong>Functions</strong><br />
<strong>5.</strong>4 Direct comm<strong>and</strong>s<br />
<strong>5.</strong>4.1 Comm<strong>and</strong> for adjustment<br />
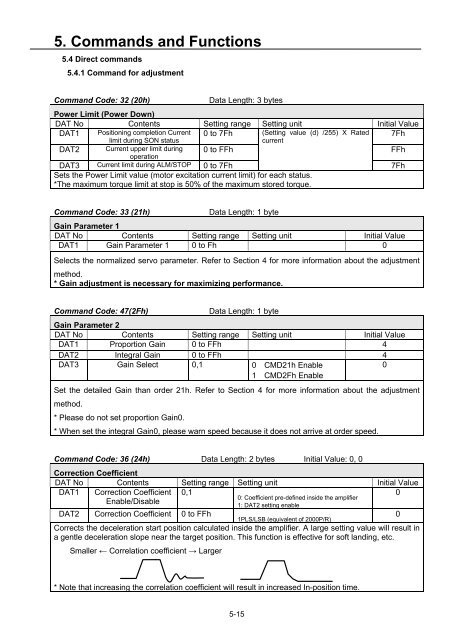
Comm<strong>and</strong> Code: 32 (20h)<br />
Data Length: 3 bytes<br />
Power Limit (Power Down)<br />
DAT No Contents Setting range Setting unit Initial Value<br />
DAT1 Positioning completion Current 0 to 7Fh (Setting value (d) /255) X Rated 7Fh<br />
limit during SON status<br />
current<br />
DAT2 Current upper limit during 0 to FFh FFh<br />
operation<br />
DAT3 Current limit during ALM/STOP 0 to 7Fh<br />
7Fh<br />
Sets the Power Limit value (motor excitation current limit) for each status.<br />
*The maximum torque limit at stop is 50% of the maximum stored torque.<br />
Comm<strong>and</strong> Code: 33 (21h)<br />
Data Length: 1 byte<br />
Gain Parameter 1<br />
DAT No Contents Setting range Setting unit Initial Value<br />
DAT1 Gain Parameter 1 0 to Fh 0<br />
Selects the normalized servo parameter. Refer to Section 4 for more information about the adjustment<br />
method.<br />
* Gain adjustment is necessary for maximizing performance.<br />
Comm<strong>and</strong> Code: 47(2Fh)<br />
Data Length: 1 byte<br />
Gain Parameter 2<br />
DAT No Contents Setting range Setting unit Initial Value<br />
DAT1 Proportion Gain 0 to FFh 4<br />
DAT2 Integral Gain 0 to FFh 4<br />
DAT3 Gain Select 0,1 0CMD21h Enable<br />
1CMD2Fh Enable<br />
0<br />
Set the detailed Gain than order 21h. Refer to Section 4 for more information about the adjustment<br />
method.<br />
* Please do not set proportion Gain0.<br />
* When set the integral Gain0, please warn speed because it does not arrive at order speed.<br />
Comm<strong>and</strong> Code: 36 (24h) Data Length: 2 bytes Initial Value: 0, 0<br />
Correction Coefficient<br />
DAT No Contents Setting range Setting unit Initial Value<br />
DAT1 Correction Coefficient<br />
Enable/Disable<br />
0,1<br />
0<br />
DAT2 Correction Coefficient 0 to FFh<br />
0: Coefficient pre-defined inside the amplifier<br />
1: DAT2 setting enable<br />
1PLS/LSB (equivalent of 2000P/R)<br />
Corrects the deceleration start position calculated inside the amplifier. A large setting value will result in<br />
a gentle deceleration slope near the target position. This function is effective for soft l<strong>and</strong>ing, etc.<br />
Smaller ← Correlation coefficient → Larger<br />
0<br />
* Note that increasing the correlation coefficient will result in increased In-position time.<br />
5-15













