Congreso Nacional de la Carne - Eurocarne
Congreso Nacional de la Carne - Eurocarne
Congreso Nacional de la Carne - Eurocarne

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
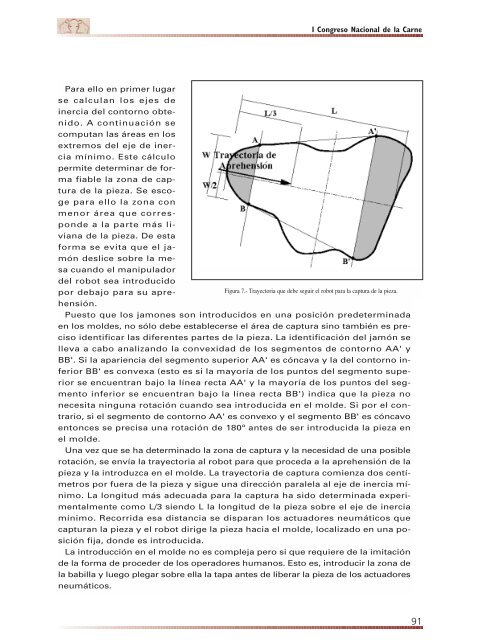
I <strong>Congreso</strong> <strong>Nacional</strong> <strong>de</strong> <strong>la</strong> <strong>Carne</strong>Para ello en primer lugarse calcu<strong>la</strong>n los ejes <strong>de</strong>inercia <strong>de</strong>l contorno obtenido.A continuación secomputan <strong>la</strong>s áreas en losextremos <strong>de</strong>l eje <strong>de</strong> inerciamínimo. Este cálculopermite <strong>de</strong>terminar <strong>de</strong> formafiable <strong>la</strong> zona <strong>de</strong> captura<strong>de</strong> <strong>la</strong> pieza. Se escogepara ello <strong>la</strong> zona conmenor área que correspon<strong>de</strong>a <strong>la</strong> parte más liviana<strong>de</strong> <strong>la</strong> pieza. De estaforma se evita que el jamón<strong>de</strong>slice sobre <strong>la</strong> mesacuando el manipu<strong>la</strong>dor<strong>de</strong>l robot sea introducidopor <strong>de</strong>bajo para su aprehensión.Figura 7.- Trayectoria que <strong>de</strong>be seguir el robot para <strong>la</strong> captura <strong>de</strong> <strong>la</strong> pieza.Puesto que los jamones son introducidos en una posición pre<strong>de</strong>terminadaen los mol<strong>de</strong>s, no sólo <strong>de</strong>be establecerse el área <strong>de</strong> captura sino también es precisoi<strong>de</strong>ntificar <strong>la</strong>s diferentes partes <strong>de</strong> <strong>la</strong> pieza. La i<strong>de</strong>ntificación <strong>de</strong>l jamón selleva a cabo analizando <strong>la</strong> convexidad <strong>de</strong> los segmentos <strong>de</strong> contorno AA' yBB'. Si <strong>la</strong> apariencia <strong>de</strong>l segmento superior AA' es cóncava y <strong>la</strong> <strong>de</strong>l contorno inferiorBB' es convexa (esto es si <strong>la</strong> mayoría <strong>de</strong> los puntos <strong>de</strong>l segmento superiorse encuentran bajo <strong>la</strong> línea recta AA' y <strong>la</strong> mayoría <strong>de</strong> los puntos <strong>de</strong>l segmentoinferior se encuentran bajo <strong>la</strong> línea recta BB') indica que <strong>la</strong> pieza nonecesita ninguna rotación cuando sea introducida en el mol<strong>de</strong>. Si por el contrario,si el segmento <strong>de</strong> contorno AA' es convexo y el segmento BB' es cóncavoentonces se precisa una rotación <strong>de</strong> 180º antes <strong>de</strong> ser introducida <strong>la</strong> pieza enel mol<strong>de</strong>.Una vez que se ha <strong>de</strong>terminado <strong>la</strong> zona <strong>de</strong> captura y <strong>la</strong> necesidad <strong>de</strong> una posiblerotación, se envía <strong>la</strong> trayectoria al robot para que proceda a <strong>la</strong> aprehensión <strong>de</strong> <strong>la</strong>pieza y <strong>la</strong> introduzca en el mol<strong>de</strong>. La trayectoria <strong>de</strong> captura comienza dos centímetrospor fuera <strong>de</strong> <strong>la</strong> pieza y sigue una dirección parale<strong>la</strong> al eje <strong>de</strong> inercia mínimo.La longitud más a<strong>de</strong>cuada para <strong>la</strong> captura ha sido <strong>de</strong>terminada experimentalmentecomo L/3 siendo L <strong>la</strong> longitud <strong>de</strong> <strong>la</strong> pieza sobre el eje <strong>de</strong> inerciamínimo. Recorrida esa distancia se disparan los actuadores neumáticos quecapturan <strong>la</strong> pieza y el robot dirige <strong>la</strong> pieza hacia el mol<strong>de</strong>, localizado en una posiciónfija, don<strong>de</strong> es introducida.La introducción en el mol<strong>de</strong> no es compleja pero si que requiere <strong>de</strong> <strong>la</strong> imitación<strong>de</strong> <strong>la</strong> forma <strong>de</strong> proce<strong>de</strong>r <strong>de</strong> los operadores humanos. Esto es, introducir <strong>la</strong> zona <strong>de</strong><strong>la</strong> babil<strong>la</strong> y luego plegar sobre el<strong>la</strong> <strong>la</strong> tapa antes <strong>de</strong> liberar <strong>la</strong> pieza <strong>de</strong> los actuadoresneumáticos.91