

KR C2 edition2005 - KUKA Robotics
KR C2 edition2005 - KUKA Robotics
KR C2 edition2005 - KUKA Robotics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Stand: 06.10.2010 Version: Spez <strong>KR</strong> <strong>C2</strong> ed05 V5 da<br />
4 Planlægning<br />
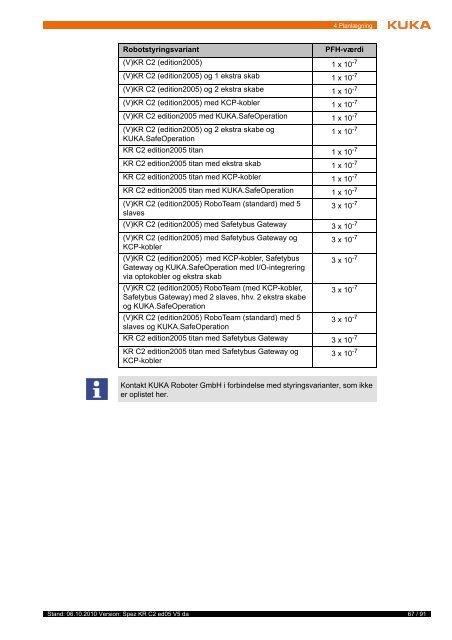
Robotstyringsvariant PFH-værdi<br />
(V)<strong>KR</strong> <strong>C2</strong> (<strong>edition2005</strong>) 1 x 10 -7<br />
(V)<strong>KR</strong> <strong>C2</strong> (<strong>edition2005</strong>) og 1 ekstra skab 1 x 10 -7<br />
(V)<strong>KR</strong> <strong>C2</strong> (<strong>edition2005</strong>) og 2 ekstra skabe 1 x 10 -7<br />
(V)<strong>KR</strong> <strong>C2</strong> (<strong>edition2005</strong>) med KCP-kobler 1 x 10 -7<br />
(V)<strong>KR</strong> <strong>C2</strong> <strong>edition2005</strong> med <strong>KUKA</strong>.SafeOperation 1 x 10 -7<br />
(V)<strong>KR</strong> <strong>C2</strong> (<strong>edition2005</strong>) og 2 ekstra skabe og<br />
<strong>KUKA</strong>.SafeOperation<br />
1 x 10 -7<br />
<strong>KR</strong> <strong>C2</strong> <strong>edition2005</strong> titan 1 x 10 -7<br />
<strong>KR</strong> <strong>C2</strong> <strong>edition2005</strong> titan med ekstra skab 1 x 10 -7<br />
<strong>KR</strong> <strong>C2</strong> <strong>edition2005</strong> titan med KCP-kobler 1 x 10 -7<br />
<strong>KR</strong> <strong>C2</strong> <strong>edition2005</strong> titan med <strong>KUKA</strong>.SafeOperation 1 x 10 -7<br />
(V)<strong>KR</strong> <strong>C2</strong> (<strong>edition2005</strong>) RoboTeam (standard) med 5<br />
slaves<br />
3 x 10 -7<br />
(V)<strong>KR</strong> <strong>C2</strong> (<strong>edition2005</strong>) med Safetybus Gateway 3 x 10 -7<br />
(V)<strong>KR</strong> <strong>C2</strong> (<strong>edition2005</strong>) med Safetybus Gateway og<br />
KCP-kobler<br />
(V)<strong>KR</strong> <strong>C2</strong> (<strong>edition2005</strong>) med KCP-kobler, Safetybus<br />
Gateway og <strong>KUKA</strong>.SafeOperation med I/O-integrering<br />
via optokobler og ekstra skab<br />
(V)<strong>KR</strong> <strong>C2</strong> (<strong>edition2005</strong>) RoboTeam (med KCP-kobler,<br />
Safetybus Gateway) med 2 slaves, hhv. 2 ekstra skabe<br />
og <strong>KUKA</strong>.SafeOperation<br />
(V)<strong>KR</strong> <strong>C2</strong> (<strong>edition2005</strong>) RoboTeam (standard) med 5<br />
slaves og <strong>KUKA</strong>.SafeOperation<br />
3 x 10 -7<br />
3 x 10 -7<br />
3 x 10 -7<br />
3 x 10 -7<br />
<strong>KR</strong> <strong>C2</strong> <strong>edition2005</strong> titan med Safetybus Gateway 3 x 10 -7<br />
<strong>KR</strong> <strong>C2</strong> <strong>edition2005</strong> titan med Safetybus Gateway og<br />
KCP-kobler<br />
3 x 10 -7<br />
Kontakt <strong>KUKA</strong> Roboter GmbH i forbindelse med styringsvarianter, som ikke<br />
er oplistet her.<br />
67 / 91














