Elektrische Maschinen Teil: 1 u. 2
Elektrische Maschinen Teil: 1 u. 2
Elektrische Maschinen Teil: 1 u. 2

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Prof. Dr.-Ing. Eugen 3-20<br />
<strong>Elektrische</strong> <strong>Maschinen</strong><br />
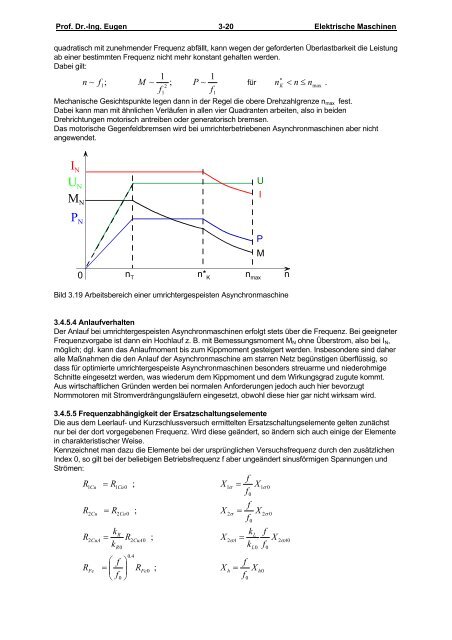
quadratisch mit zunehmender Frequenz abfällt, kann wegen der geforderten Überlastbarkeit die Leistung<br />
ab einer bestimmten Frequenz nicht mehr konstant gehalten werden.<br />
Dabei gilt:<br />
1 1<br />
∗<br />
n ~ f1;<br />
M ~ ; P ~<br />
für n n nmax<br />
.<br />
2<br />
K < ≤<br />
f1<br />
f1<br />
Mechanische Gesichtspunkte legen dann in der Regel die obere Drehzahlgrenze nmax fest.<br />
Dabei kann man mit ähnlichen Verläufen in allen vier Quadranten arbeiten, also in beiden<br />
Drehrichtungen motorisch antreiben oder generatorisch bremsen.<br />
Das motorische Gegenfeldbremsen wird bei umrichterbetriebenen Asynchronmaschinen aber nicht<br />
angewendet.<br />
IN UN MN PN 0<br />
n T<br />
n* K<br />
U<br />
I<br />
P<br />
M<br />
n max<br />
Bild 3.19 Arbeitsbereich einer umrichtergespeisten Asynchronmaschine<br />
3.4.5.4 Anlaufverhalten<br />
Der Anlauf bei umrichtergespeisten Asynchronmaschinen erfolgt stets über die Frequenz. Bei geeigneter<br />
Frequenzvorgabe ist dann ein Hochlauf z. B. mit Bemessungsmoment MN ohne Überstrom, also bei IN,<br />
möglich; dgl. kann das Anlaufmoment bis zum Kippmoment gesteigert werden. Insbesondere sind daher<br />
alle Maßnahmen die den Anlauf der Asynchronmaschine am starren Netz begünstigen überflüssig, so<br />
dass für optimierte umrichtergespeiste Asynchronmaschinen besonders streuarme und niederohmige<br />
Schnitte eingesetzt werden, was wiederum dem Kippmoment und dem Wirkungsgrad zugute kommt.<br />
Aus wirtschaftlichen Gründen werden bei normalen Anforderungen jedoch auch hier bevorzugt<br />
Normmotoren mit Stromverdrängungsläufern eingesetzt, obwohl diese hier gar nicht wirksam wird.<br />
3.4.5.5 Frequenzabhängigkeit der Ersatzschaltungselemente<br />
Die aus dem Leerlauf- und Kurzschlussversuch ermittelten Ersatzschaltungselemente gelten zunächst<br />
nur bei der dort vorgegebenen Frequenz. Wird diese geändert, so ändern sich auch einige der Elemente<br />
in charakteristischer Weise.<br />
Kennzeichnet man dazu die Elemente bei der ursprünglichen Versuchsfrequenz durch den zusätzlichen<br />
Index 0, so gilt bei der beliebigen Betriebsfrequenz f aber ungeändert sinusförmigen Spannungen und<br />
Strömen:<br />
R<br />
R<br />
R<br />
R<br />
1Cu<br />
2Cu<br />
2CuA<br />
Fe<br />
= R<br />
= R<br />
k<br />
=<br />
k<br />
⎛<br />
= ⎜<br />
⎝<br />
1Cu0<br />
2Cu0<br />
R<br />
R0<br />
f<br />
f<br />
0<br />
R<br />
⎞<br />
⎟<br />
⎠<br />
;<br />
;<br />
2CuA0<br />
0.<br />
4<br />
R<br />
Fe0<br />
;<br />
;<br />
X<br />
X<br />
X<br />
X<br />
1σ<br />
2σ<br />
2σA<br />
h<br />
=<br />
f<br />
f0<br />
X<br />
=<br />
f<br />
f0<br />
X<br />
kL<br />
=<br />
k<br />
f<br />
f<br />
=<br />
f<br />
f<br />
0<br />
L0<br />
X<br />
1σ<br />
0<br />
2σ<br />
0<br />
h0<br />
0<br />
X<br />
n<br />
2σA0