Workshop proceeding - final.pdf - Faculty of Information and ...
Workshop proceeding - final.pdf - Faculty of Information and ...
Workshop proceeding - final.pdf - Faculty of Information and ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
10]: The transitions <strong>of</strong> target locations (defined by range <strong>and</strong> apparent Doppler) are governed by the<br />
ambiguity number, i.e., mode variable, while the ambiguity number transitions are state-dependent.<br />
Exploiting the admissible transitions <strong>of</strong> target locations <strong>and</strong> ambiguity number, we have proposed a<br />
dynamic programming (DP) based method for joint maximum a posteriori (MAP) estimation <strong>of</strong><br />
target’s trajectory in the ambiguous range-Doppler maps <strong>and</strong> the corresponding ambiguity number<br />
sequence. The proposed method is investigated under both known <strong>and</strong> unknown nuisance parameters<br />
(target power <strong>and</strong> noise variance). The detection <strong>and</strong> tracking performances <strong>of</strong> the proposed algorithm<br />
are studied with respect to different system settings. Moreover, the effect <strong>of</strong> the prior uncertainty <strong>of</strong><br />
the nuisance parameters on the detection <strong>and</strong> tracking performance is also investigated.<br />
2. Signal processing model for low PRF surveillance radars<br />
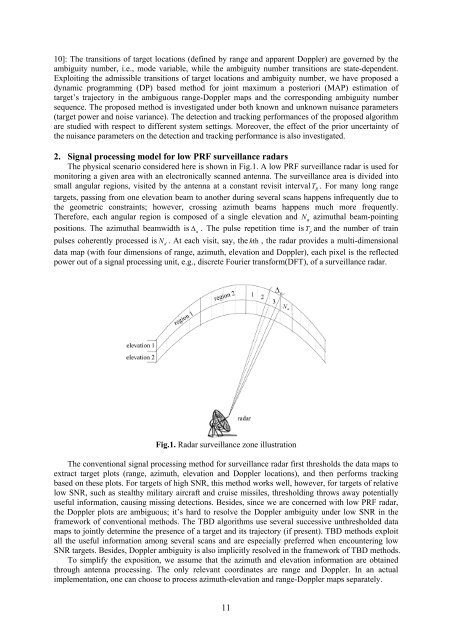
The physical scenario considered here is shown in Fig.1. A low PRF surveillance radar is used for<br />
monitoring a given area with an electronically scanned antenna. The surveillance area is divided into<br />
small angular regions, visited by the antenna at a constant revisit intervalT R<br />
. For many long range<br />
targets, passing from one elevation beam to another during several scans happens infrequently due to<br />
the geometric constraints; however, crossing azimuth beams happens much more frequently.<br />
Therefore, each angular region is composed <strong>of</strong> a single elevation <strong>and</strong> N a azimuthal beam-pointing<br />
positions. The azimuthal beamwidth is Δ<br />
a<br />
. The pulse repetition time is T p<br />
<strong>and</strong> the number <strong>of</strong> train<br />
pulses coherently processed is Nd<br />
. At each visit, say, the kth<br />
, the radar provides a multi-dimensional<br />
data map (with four dimensions <strong>of</strong> range, azimuth, elevation <strong>and</strong> Doppler), each pixel is the reflected<br />
power out <strong>of</strong> a signal processing unit, e.g., discrete Fourier transform(DFT), <strong>of</strong> a surveillance radar.<br />
Fig.1. Radar surveillance zone illustration<br />
The conventional signal processing method for surveillance radar first thresholds the data maps to<br />
extract target plots (range, azimuth, elevation <strong>and</strong> Doppler locations), <strong>and</strong> then performs tracking<br />
based on these plots. For targets <strong>of</strong> high SNR, this method works well, however, for targets <strong>of</strong> relative<br />
low SNR, such as stealthy military aircraft <strong>and</strong> cruise missiles, thresholding throws away potentially<br />
useful information, causing missing detections. Besides, since we are concerned with low PRF radar,<br />
the Doppler plots are ambiguous; it’s hard to resolve the Doppler ambiguity under low SNR in the<br />
framework <strong>of</strong> conventional methods. The TBD algorithms use several successive unthresholded data<br />
maps to jointly determine the presence <strong>of</strong> a target <strong>and</strong> its trajectory (if present). TBD methods exploit<br />
all the useful information among several scans <strong>and</strong> are especially preferred when encountering low<br />
SNR targets. Besides, Doppler ambiguity is also implicitly resolved in the framework <strong>of</strong> TBD methods.<br />
To simplify the exposition, we assume that the azimuth <strong>and</strong> elevation information are obtained<br />
through antenna processing. The only relevant coordinates are range <strong>and</strong> Doppler. In an actual<br />
implementation, one can choose to process azimuth-elevation <strong>and</strong> range-Doppler maps separately.<br />
11