Workshop proceeding - final.pdf - Faculty of Information and ...
Workshop proceeding - final.pdf - Faculty of Information and ...
Workshop proceeding - final.pdf - Faculty of Information and ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Definition 2 The probability <strong>of</strong> target detection <strong>and</strong> reliable tracking P dT ,<br />
is defined as the probability<br />
<strong>of</strong> making a correct target detection <strong>and</strong> <strong>of</strong> recovering a target trajectory such that each retrieved<br />
state, ( iˆ<br />
ˆ<br />
k, lk)<br />
, k = 1,... K , is within ε<br />
r<br />
cells in range <strong>and</strong> ε d<br />
cells in Doppler from the actual location, <strong>and</strong><br />
the estimated ambiguity number sequence ˆ K<br />
Μ = ( mˆ ˆ<br />
1,..., m K<br />
) is equal to the true one. Hence<br />
PdT ,<br />
= Pr<br />
⎛(<br />
max<br />
K( K, mK)<br />
V<br />
⎞<br />
⎜ Γ x ><br />
T<br />
∪<br />
dT , ⎟<br />
⎝ xK,<br />
m<br />
) E (57)<br />
K<br />
⎠<br />
where the event<br />
E dT ,<br />
is expressed as<br />
abs( iˆ<br />
k<br />
−ik)<br />
≤ ε<br />
r, abs( lˆ<br />
k<br />
−lk)<br />
≤ εd, k = 1,... K , Μˆ K = Μ<br />
K<br />
(58)<br />
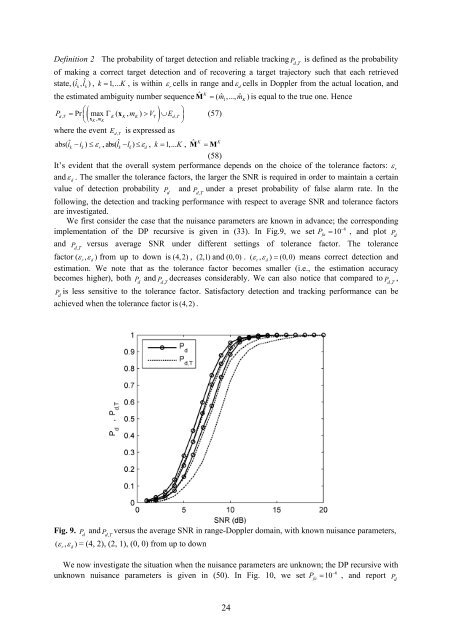
It’s evident that the overall system performance depends on the choice <strong>of</strong> the tolerance factors: ε r<br />
<strong>and</strong> ε d<br />
. The smaller the tolerance factors, the larger the SNR is required in order to maintain a certain<br />
value <strong>of</strong> detection probability P d<br />
<strong>and</strong> P under a preset probability <strong>of</strong> false alarm rate. In the<br />
dT ,<br />
following, the detection <strong>and</strong> tracking performance with respect to average SNR <strong>and</strong> tolerance factors<br />
are investigated.<br />
We first consider the case that the nuisance parameters are known in advance; the corresponding<br />
−6<br />
implementation <strong>of</strong> the DP recursive is given in (33). In Fig.9, we set P fa<br />
= 10 , <strong>and</strong> plot P<br />
d<br />
<strong>and</strong> P versus average SNR under different settings <strong>of</strong> tolerance factor. The tolerance<br />
dT ,<br />
factor ( ε<br />
r, ε<br />
d)<br />
from up to down is (4,2) , (2,1) <strong>and</strong> (0,0) . ( ε<br />
r, ε<br />
d) = (0,0) means correct detection <strong>and</strong><br />
estimation. We note that as the tolerance factor becomes smaller (i.e., the estimation accuracy<br />
becomes higher), both P d<br />
<strong>and</strong> P dT ,<br />
decreases considerably. We can also notice that compared to P dT ,<br />
,<br />
P is less sensitive to the tolerance factor. Satisfactory detection <strong>and</strong> tracking performance can be<br />
d<br />
achieved when the tolerance factor is (4,2) .<br />
Fig. 9. P <strong>and</strong><br />
d<br />
P dT ,<br />
versus the average SNR in range-Doppler domain, with known nuisance parameters,<br />
( ε , ε ) = (4, 2), (2, 1), (0, 0) from up to down<br />
r<br />
d<br />
We now investigate the situation when the nuisance parameters are unknown; the DP recursive with<br />
−6<br />
unknown nuisance parameters is given in (50). In Fig. 10, we set P fa<br />
= 10 , <strong>and</strong> report P d<br />
24