Workshop proceeding - final.pdf - Faculty of Information and ...
Workshop proceeding - final.pdf - Faculty of Information and ...
Workshop proceeding - final.pdf - Faculty of Information and ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Where u ′ , v′<br />
) is the point position in the full resolution image Im Oe , ρ u ′ , v′<br />
) is the correlation<br />
(<br />
k k<br />
(<br />
k k<br />
coefficient <strong>of</strong> accurate image registration, ρl<br />
( uk<br />
, vk<br />
) is the correlation coefficient <strong>of</strong> rough image<br />
registration. Through the step, we can get the registration position u ′ , ′ ) .<br />
( * v *<br />
k k<br />
The <strong>final</strong> step is the estimation <strong>of</strong> rotation angle. At present the permitted rotation angle θ range is<br />
from -10°to 10°. We divide the range into 200 angles. To each angle, we calculate its correlation<br />
coefficient, then choose the angle θ * with the maximum correlation value.<br />
4. Experiment results<br />
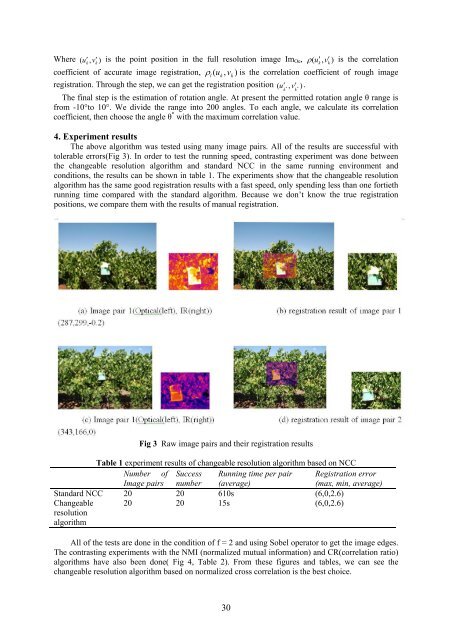
The above algorithm was tested using many image pairs. All <strong>of</strong> the results are successful with<br />
tolerable errors(Fig 3). In order to test the running speed, contrasting experiment was done between<br />
the changeable resolution algorithm <strong>and</strong> st<strong>and</strong>ard NCC in the same running environment <strong>and</strong><br />
conditions, the results can be shown in table 1. The experiments show that the changeable resolution<br />
algorithm has the same good registration results with a fast speed, only spending less than one fortieth<br />
running time compared with the st<strong>and</strong>ard algorithm. Because we don’t know the true registration<br />
positions, we compare them with the results <strong>of</strong> manual registration.<br />
Fig 3 Raw image pairs <strong>and</strong> their registration results<br />
Table 1 experiment results <strong>of</strong> changeable resolution algorithm based on NCC<br />
Number <strong>of</strong> Success Running time per pair Registration error<br />
Image pairs number (average)<br />
(max, min, average)<br />
St<strong>and</strong>ard NCC 20 20 610s (6,0,2.6)<br />
Changeable<br />
resolution<br />
algorithm<br />
20 20 15s (6,0,2.6)<br />
All <strong>of</strong> the tests are done in the condition <strong>of</strong> f = 2 <strong>and</strong> using Sobel operator to get the image edges.<br />
The contrasting experiments with the NMI (normalized mutual information) <strong>and</strong> CR(correlation ratio)<br />
algorithms have also been done( Fig 4, Table 2). From these figures <strong>and</strong> tables, we can see the<br />
changeable resolution algorithm based on normalized cross correlation is the best choice.<br />
30