Workshop proceeding - final.pdf - Faculty of Information and ...
Workshop proceeding - final.pdf - Faculty of Information and ...
Workshop proceeding - final.pdf - Faculty of Information and ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
( xˆ<br />
, m ˆ ) = argmax Γ ( x , m )<br />
(51)<br />
k k k k k<br />
xk,<br />
mk<br />
The previous states <strong>and</strong> modes are found by tracing backwards from ( xˆ<br />
, mˆ<br />
).<br />
k<br />
k<br />
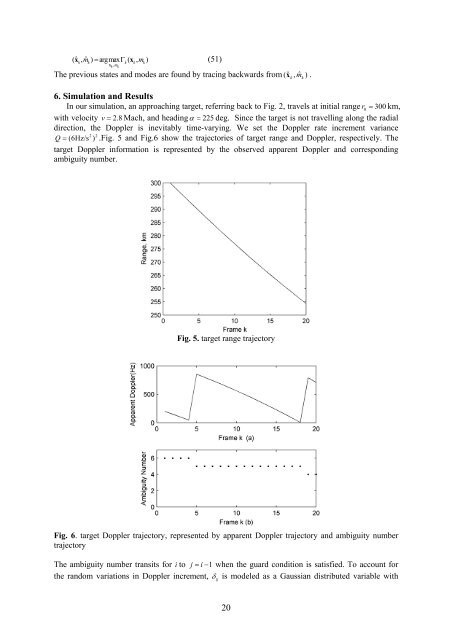
6. Simulation <strong>and</strong> Results<br />
In our simulation, an approaching target, referring back to Fig. 2, travels at initial range r<br />
0<br />
= 300 km,<br />
with velocity v = 2.8 Mach, <strong>and</strong> headingα = 225 deg. Since the target is not travelling along the radial<br />
direction, the Doppler is inevitably time-varying. We set the Doppler rate increment variance<br />
2 2<br />
Q = (6Hz/s ) .Fig. 5 <strong>and</strong> Fig.6 show the trajectories <strong>of</strong> target range <strong>and</strong> Doppler, respectively. The<br />
target Doppler information is represented by the observed apparent Doppler <strong>and</strong> corresponding<br />
ambiguity number.<br />
Fig. 5. target range trajectory<br />
Fig. 6. target Doppler trajectory, represented by apparent Doppler trajectory <strong>and</strong> ambiguity number<br />
trajectory<br />
The ambiguity number transits for i to j = i − 1 when the guard condition is satisfied. To account for<br />
the r<strong>and</strong>om variations in Doppler increment, δ ij<br />
is modeled as a Gaussian distributed variable with<br />
20