Workshop proceeding - final.pdf - Faculty of Information and ...
Workshop proceeding - final.pdf - Faculty of Information and ...
Workshop proceeding - final.pdf - Faculty of Information and ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
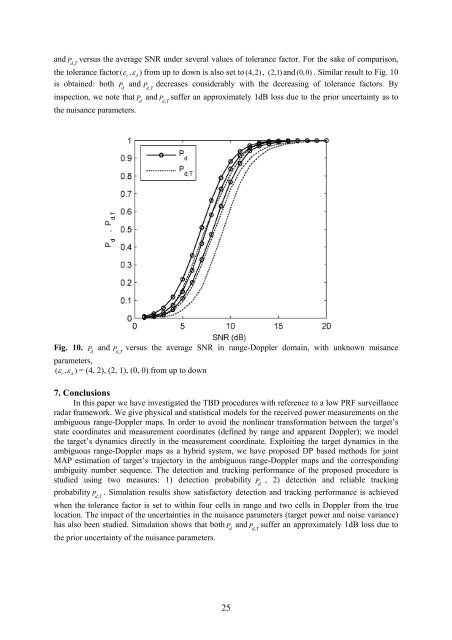
<strong>and</strong> P dT ,<br />
versus the average SNR under several values <strong>of</strong> tolerance factor. For the sake <strong>of</strong> comparison,<br />
the tolerance factor ( ε<br />
r, ε<br />
d)<br />
from up to down is also set to (4,2) , (2,1) <strong>and</strong> (0,0) . Similar result to Fig. 10<br />
is obtained: both P d<br />
<strong>and</strong> P decreases considerably with the decreasing <strong>of</strong> tolerance factors. By<br />
dT ,<br />
inspection, we note that P d<br />
<strong>and</strong> P dT ,<br />
suffer an approximately 1dB loss due to the prior uncertainty as to<br />
the nuisance parameters.<br />
Fig. 10. P <strong>and</strong><br />
d<br />
P versus the average SNR in range-Doppler domain, with unknown nuisance<br />
dT ,<br />
parameters,<br />
( ε , ε ) = (4, 2), (2, 1), (0, 0) from up to down<br />
r<br />
d<br />
7. Conclusions<br />
In this paper we have investigated the TBD procedures with reference to a low PRF surveillance<br />
radar framework. We give physical <strong>and</strong> statistical models for the received power measurements on the<br />
ambiguous range-Doppler maps. In order to avoid the nonlinear transformation between the target’s<br />
state coordinates <strong>and</strong> measurement coordinates (defined by range <strong>and</strong> apparent Doppler); we model<br />
the target’s dynamics directly in the measurement coordinate. Exploiting the target dynamics in the<br />
ambiguous range-Doppler maps as a hybrid system, we have proposed DP based methods for joint<br />
MAP estimation <strong>of</strong> target’s trajectory in the ambiguous range-Doppler maps <strong>and</strong> the corresponding<br />
ambiguity number sequence. The detection <strong>and</strong> tracking performance <strong>of</strong> the proposed procedure is<br />
studied using two measures: 1) detection probability P d<br />
, 2) detection <strong>and</strong> reliable tracking<br />
probability P dT ,<br />
. Simulation results show satisfactory detection <strong>and</strong> tracking performance is achieved<br />
when the tolerance factor is set to within four cells in range <strong>and</strong> two cells in Doppler from the true<br />
location. The impact <strong>of</strong> the uncertainties in the nuisance parameters (target power <strong>and</strong> noise variance)<br />
has also been studied. Simulation shows that both P d<br />
<strong>and</strong> P dT ,<br />
suffer an approximately 1dB loss due to<br />
the prior uncertainty <strong>of</strong> the nuisance parameters.<br />
25