Workshop proceeding - final.pdf - Faculty of Information and ...
Workshop proceeding - final.pdf - Faculty of Information and ...
Workshop proceeding - final.pdf - Faculty of Information and ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
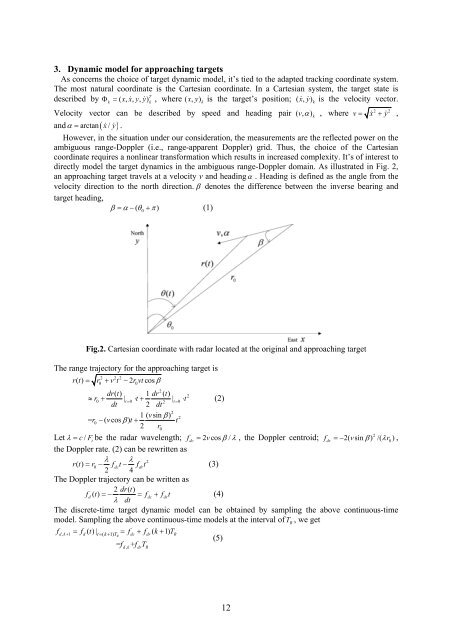
3. Dynamic model for approaching targets<br />
As concerns the choice <strong>of</strong> target dynamic model, it’s tied to the adapted tracking coordinate system.<br />
The most natural coordinate is the Cartesian coordinate. In a Cartesian system, the target state is<br />
described by ( x, xyy , , ) T x y<br />
x& y&<br />
is the velocity vector.<br />
Φ = & & , where ( , ) k<br />
k<br />
k<br />
is the target’s position; ( , ) k<br />
2 2<br />
Velocity vector can be described by speed <strong>and</strong> heading pair (, v α , where v = x& + y& ,<br />
<strong>and</strong> arctan ( x / y)<br />
α = & & .<br />
However, in the situation under our consideration, the measurements are the reflected power on the<br />
ambiguous range-Doppler (i.e., range-apparent Doppler) grid. Thus, the choice <strong>of</strong> the Cartesian<br />
coordinate requires a nonlinear transformation which results in increased complexity. It’s <strong>of</strong> interest to<br />
directly model the target dynamics in the ambiguous range-Doppler domain. As illustrated in Fig. 2,<br />
an approaching target travels at a velocity v <strong>and</strong> headingα . Heading is defined as the angle from the<br />
velocity direction to the north direction. β denotes the difference between the inverse bearing <strong>and</strong><br />
target heading,<br />
β = α − ( θ + π)<br />
(1)<br />
0<br />
) k<br />
Fig.2. Cartesian coordinate with radar located at the original <strong>and</strong> approaching target<br />
The range trajectory for the approaching target is<br />
2 2 2<br />
rt () = r + vt −2rvtcosβ<br />
0 0<br />
2<br />
dr() t 1 dr () t 2<br />
r0 |<br />
t=<br />
0<br />
t |<br />
2 t= 0<br />
t (2)<br />
≈ + ⋅ + ⋅<br />
dt 2 dt<br />
2<br />
1( vsin β ) 2<br />
= r0<br />
− ( vcos β ) t+<br />
t<br />
2 r0<br />
2<br />
Let λ = c/ Ft<br />
be the radar wavelength; fdc<br />
= 2vcos β / λ , the Doppler centroid; fdr<br />
=− 2( vsin β ) /( λr0<br />
) ,<br />
the Doppler rate. (2) can be rewritten as<br />
λ λ 2<br />
rt () = r0<br />
− fdct− fdrt<br />
(3)<br />
2 4<br />
The Doppler trajectory can be written as<br />
2 dr( t)<br />
fd()<br />
t =− = f dc<br />
+ f dr<br />
t (4)<br />
λ dt<br />
The discrete-time target dynamic model can be obtained by sampling the above continuous-time<br />
model. Sampling the above continuous-time models at the interval <strong>of</strong>T R<br />
, we get<br />
fdk , + 1<br />
= fd()| t<br />
t= ( k+<br />
1) T<br />
= f ( 1)<br />
R dc+ fdr k+<br />
TR<br />
(5)<br />
= f + f T<br />
dk , dr R<br />
12