

Applied numerical modeling of saturated / unsaturated flow and ...
Applied numerical modeling of saturated / unsaturated flow and ...
Applied numerical modeling of saturated / unsaturated flow and ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
found for a number <strong>of</strong> problems with<br />
simple geometries <strong>and</strong> boundary conditions<br />
(e.g. Bear, 1979; Van Genuchten <strong>and</strong> Alves,<br />
1982; Kinzelbach, 1983), for complex nonlinear<br />
problems exact solutions may not<br />
exist <strong>and</strong> thus approximate <strong>numerical</strong><br />
solutions must be obtained. Given the<br />
governing equations with appropriate initial<br />
<strong>and</strong> boundary conditions for a specified<br />
problem, the general strategy for a <strong>numerical</strong><br />
solution is to first convert the PDE into<br />
a system <strong>of</strong> discrete algebraic equations <strong>and</strong><br />
then to find the exact solution <strong>of</strong> the latter,<br />
which is the approximate solution <strong>of</strong> the<br />
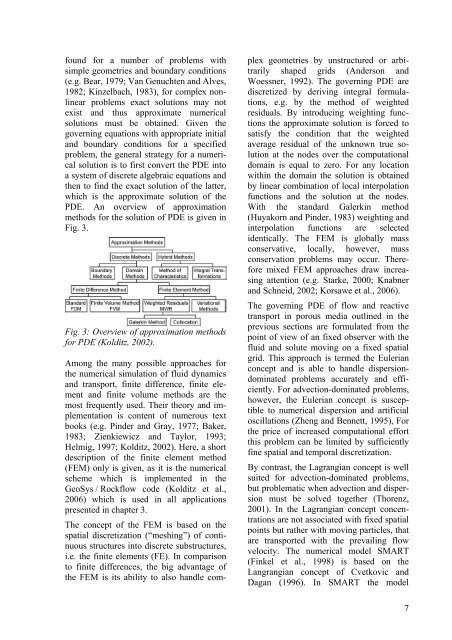
PDE. An overview <strong>of</strong> approximation<br />
methods for the solution <strong>of</strong> PDE is given in<br />
Fig. 3.<br />
Fig. 3: Overview <strong>of</strong> approximation methods<br />
for PDE (Kolditz, 2002).<br />
Among the many possible approaches for<br />
the <strong>numerical</strong> simulation <strong>of</strong> fluid dynamics<br />
<strong>and</strong> transport, finite difference, finite element<br />
<strong>and</strong> finite volume methods are the<br />
most frequently used. Their theory <strong>and</strong> implementation<br />
is content <strong>of</strong> numerous text<br />
books (e.g. Pinder <strong>and</strong> Gray, 1977; Baker,<br />
1983; Zienkiewicz <strong>and</strong> Taylor, 1993;<br />
Helmig, 1997; Kolditz, 2002). Here, a short<br />
description <strong>of</strong> the finite element method<br />
(FEM) only is given, as it is the <strong>numerical</strong><br />
scheme which is implemented in the<br />
GeoSys / Rock<strong>flow</strong> code (Kolditz et al.,<br />
2006) which is used in all applications<br />
presented in chapter 3.<br />
The concept <strong>of</strong> the FEM is based on the<br />
spatial discretization (“meshing”) <strong>of</strong> continuous<br />
structures into discrete substructures,<br />
i.e. the finite elements (FE). In comparison<br />
to finite differences, the big advantage <strong>of</strong><br />
the FEM is its ability to also h<strong>and</strong>le com-<br />
plex geometries by unstructured or arbitrarily<br />
shaped grids (Anderson <strong>and</strong><br />
Woessner, 1992). The governing PDE are<br />
discretized by deriving integral formulations,<br />
e.g. by the method <strong>of</strong> weighted<br />
residuals. By introducing weighting functions<br />
the approximate solution is forced to<br />
satisfy the condition that the weighted<br />
average residual <strong>of</strong> the unknown true solution<br />
at the nodes over the computational<br />
domain is equal to zero. For any location<br />
within the domain the solution is obtained<br />
by linear combination <strong>of</strong> local interpolation<br />
functions <strong>and</strong> the solution at the nodes.<br />
With the st<strong>and</strong>ard Galerkin method<br />
(Huyakorn <strong>and</strong> Pinder, 1983) weighting <strong>and</strong><br />
interpolation functions are selected<br />
identically. The FEM is globally mass<br />
conservative, locally, however, mass<br />
conservation problems may occur. Therefore<br />
mixed FEM approaches draw increasing<br />
attention (e.g. Starke, 2000; Knabner<br />
<strong>and</strong> Schneid, 2002; Korsawe et al., 2006).<br />
The governing PDE <strong>of</strong> <strong>flow</strong> <strong>and</strong> reactive<br />
transport in porous media outlined in the<br />
previous sections are formulated from the<br />
point <strong>of</strong> view <strong>of</strong> an fixed observer with the<br />
fluid <strong>and</strong> solute moving on a fixed spatial<br />
grid. This approach is termed the Eulerian<br />
concept <strong>and</strong> is able to h<strong>and</strong>le dispersiondominated<br />
problems accurately <strong>and</strong> efficiently.<br />
For advection-dominated problems,<br />
however, the Eulerian concept is susceptible<br />
to <strong>numerical</strong> dispersion <strong>and</strong> artificial<br />
oscillations (Zheng <strong>and</strong> Bennett, 1995), For<br />
the price <strong>of</strong> increased computational effort<br />
this problem can be limited by sufficiently<br />
fine spatial <strong>and</strong> temporal discretization.<br />
By contrast, the Lagrangian concept is well<br />
suited for advection-dominated problems,<br />
but problematic when advection <strong>and</strong> dispersion<br />
must be solved together (Thorenz,<br />
2001). In the Lagrangian concept concentrations<br />
are not associated with fixed spatial<br />
points but rather with moving particles, that<br />
are transported with the prevailing <strong>flow</strong><br />
velocity. The <strong>numerical</strong> model SMART<br />
(Finkel et al., 1998) is based on the<br />
Langrangian concept <strong>of</strong> Cvetkovic <strong>and</strong><br />
Dagan (1996). In SMART the model<br />
7














