Kapitel 6 Entwurf des Reglers auf endliche Einstellzeit - Christian ...
Kapitel 6 Entwurf des Reglers auf endliche Einstellzeit - Christian ...
Kapitel 6 Entwurf des Reglers auf endliche Einstellzeit - Christian ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
44<br />
⎛ t − T ⎞ ⎛ t − T ⎞<br />
h (t) = r0<br />
+ r1<br />
exp⎜−<br />
⎟ + r2<br />
exp⎜−<br />
⎟<br />
(6.2)<br />
⎝ τ1<br />
⎠ ⎝ τ2<br />
⎠<br />
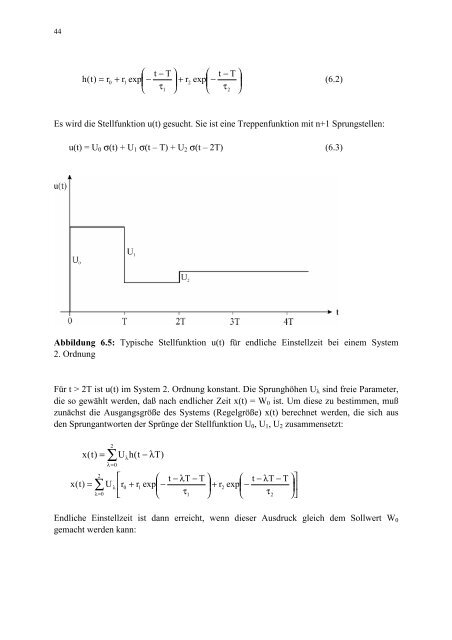
Es wird die Stellfunktion u(t) gesucht. Sie ist eine Treppenfunktion mit n+1 Sprungstellen:<br />
u(t) = U 0 σ(t) + U 1 σ(t – T) + U 2 σ(t – 2T) (6.3)<br />
Abbildung 6.5: Typische Stellfunktion u(t) für <strong>endliche</strong> <strong>Einstellzeit</strong> bei einem System<br />
2. Ordnung<br />
Für t > 2T ist u(t) im System 2. Ordnung konstant. Die Sprunghöhen U λ sind freie Parameter,<br />
die so gewählt werden, daß nach <strong>endliche</strong>r Zeit x(t) = W 0 ist. Um diese zu bestimmen, muß<br />
zunächst die Ausgangsgröße <strong>des</strong> Systems (Regelgröße) x(t) berechnet werden, die sich aus<br />
den Sprungantworten der Sprünge der Stellfunktion U 0 , U 1 , U 2 zusammensetzt:<br />
x(t) =<br />
2<br />
2<br />
∑<br />
λ= 0<br />
x(t) = ∑ U<br />
λ= 0<br />
λ<br />
U h(t − λT)<br />
⎡<br />
⎢r<br />
⎣<br />
0<br />
λ<br />
+ r<br />
1<br />
⎛ t − λT<br />
− T ⎞<br />
exp<br />
⎜−<br />
⎟ + r<br />
⎝ τ1<br />
⎠<br />
2<br />
⎛ t − λT<br />
− T ⎞⎤<br />
exp<br />
⎜−<br />
⎟⎥<br />
⎝ τ2<br />
⎠⎦<br />
Endliche <strong>Einstellzeit</strong> ist dann erreicht, wenn dieser Ausdruck gleich dem Sollwert W 0<br />
gemacht werden kann: