Cutler-Hammer - Eaton Canada
Cutler-Hammer - Eaton Canada
Cutler-Hammer - Eaton Canada

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Quick Start<br />
Before applying power to the unit, make sure it is<br />
properly wired. The input line should be<br />
connected to terminals L1, L2, and L3, and the<br />
motor should be connected to terminals T1, T2,<br />
and T3. The unit should also be properly<br />
grounded in accordance with the connection<br />
drawings in the AF93/IS903 Instruction Manual.<br />
To run the drive in KEYPAD mode, make sure a<br />
jumper or customer permissive circuit is<br />
connected between terminal 7 and 8, and terminal<br />
7 and 15. See the connection drawings in the<br />
AF93/IS903 Instruction Manual.<br />
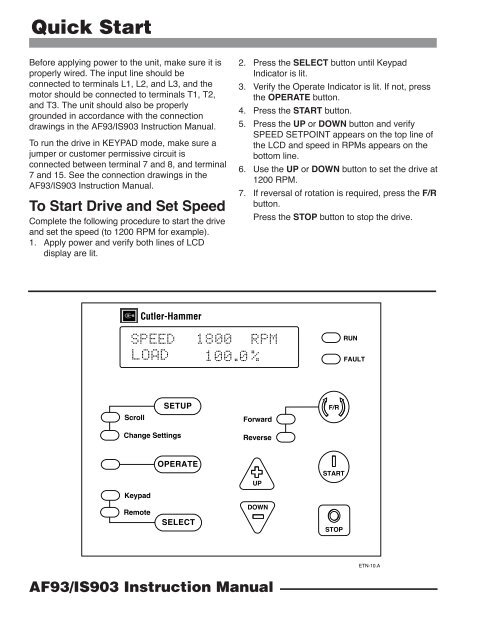
To Start Drive and Set Speed<br />
Complete the following procedure to start the drive<br />
and set the speed (to 1200 RPM for example).<br />
1. Apply power and verify both lines of LCD<br />
display are lit.<br />
Scroll<br />
SETUP<br />
Change Settings<br />
Keypad<br />
Remote<br />
<strong>Cutler</strong>-<strong>Hammer</strong><br />
OPERATE<br />
SELECT<br />
AF93/IS903 Instruction Manual<br />
2. Press the SELECT button until Keypad<br />
Indicator is lit.<br />
3. Verify the Operate Indicator is lit. If not, press<br />
the OPERATE button.<br />
4. Press the START button.<br />
5. Press the UP or DOWN button and verify<br />
SPEED SETPOINT appears on the top line of<br />
the LCD and speed in RPMs appears on the<br />
bottom line.<br />
6. Use the UP or DOWN button to set the drive at<br />
1200 RPM.<br />
7. If reversal of rotation is required, press the F/R<br />
button.<br />
Press the STOP button to stop the drive.<br />
Forward<br />
Reverse<br />
UP<br />
DOWN<br />
F/R<br />
START<br />
STOP<br />
RUN<br />
FAULT<br />
ETN-10.A