


You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
28 1. ORGANI DI PRESA: TIPOLOGIE E CARATTERISTICHE<br />
in particolare per la presa di wafers di silicio. I gripper elettroadesivi, a confronto<br />
di quelli ad aspirazione, possono sollevare wafers contenenti fori e possono lavorare<br />
in ambienti dove é stato creato il vuoto ([1]).<br />
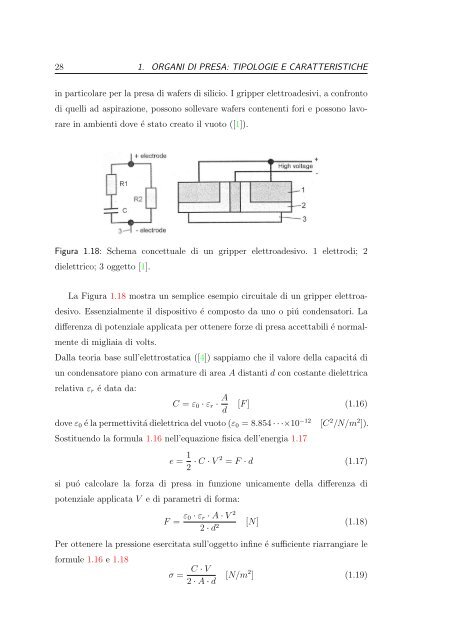
Figura 1.18: Schema concettuale di un gripper elettroadesivo. 1 elettrodi; 2<br />
dielettrico; 3 oggetto [1].<br />
La Figura 1.18 mostra un semplice esempio circuitale di un gripper elettroadesivo.<br />
Essenzialmente il dispositivo é composto da uno o piú condensatori. La<br />
differenza di potenziale applicata per ottenere forze di presa accettabili é normalmente<br />
di migliaia di volts.<br />
Dalla teoria base sull’elettrostatica ([4]) sappiamo che il valore della capacitá di<br />
un condensatore piano con armature di area A distanti d con costante dielettrica<br />
relativa ε r é data da:<br />
C = ε 0 · ε r · A<br />
d<br />
[F ] (1.16)<br />
dove ε 0 é la permettivitá dielettrica del vuoto (ε 0 = 8.854 · · ·×10 −12 [C 2 /N/m 2 ]).<br />
Sostituendo la formula 1.16 nell’equazione fisica dell’energia 1.17<br />
e = 1 2 · C · V 2 = F · d (1.17)<br />
si puó calcolare la forza di presa in funzione unicamente della differenza di<br />
potenziale applicata V e di parametri di forma:<br />
F = ε 0 · ε r · A · V 2<br />
2 · d 2 [N] (1.18)<br />
Per ottenere la pressione esercitata sull’oggetto infine é sufficiente riarrangiare le<br />
formule 1.16 e 1.18<br />
σ =<br />
C · V<br />
2 · A · d<br />
[N/m 2 ] (1.19)













