


Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3.2. SISTEMI DI CAMBIO PINZE O GRIFFE 63<br />
Ogni interfaccia ha connettori opportuni per l’alimentazione e il controllo. L’accoppiamento<br />
meccanico é realizzato attraverso meccanismi semplici che garantiscono<br />
robustezza, sicurezza e una rapida sostituzione, le tipologie di meccanismi<br />
sono approfondite in [1]. Nelle versioni automatiche le operazioni di aggancio<br />
e sgancio vengono azionate da elementi elettrici, pneumatici oppure meccanicamente<br />
bloccando l’organo di presa e compiendo specifici movimenti con il braccio<br />
robotico. Un sistema di cambio gripper é composto da una flangia interconnessa<br />
con il manipolatore e da una flangia di connessione per ogni pinza, inoltre richede<br />
una stazione per il deposito dei vari terminali. La sostituzione automatica solitamente<br />
richiede dai due ai sette secondi in base alle caratteristiche del sistema.<br />
Se l’applicazione ha una bassa frequenza di sostituzione delle pinze, un’alternativa<br />
economica al cambio gripper automatico é il cambio gripper manuale. L’unitá<br />
é composta, come per la versione automatizzata, di una flangia per il manipolatore<br />
e una flangia per ogni gripper. Le azioni per la sostituzione sono puramente<br />
meccaniche con sistemi di fissaggio a gancio. Il tempo per un cambio gripper ovviamente<br />
dipende dall’operatore e dal tipo di pinza da sostituire, infatti alcune<br />
pinze universali possono essere anche molto grandi e pesanti, rendendo difficoltosa<br />
la sostituzione.<br />
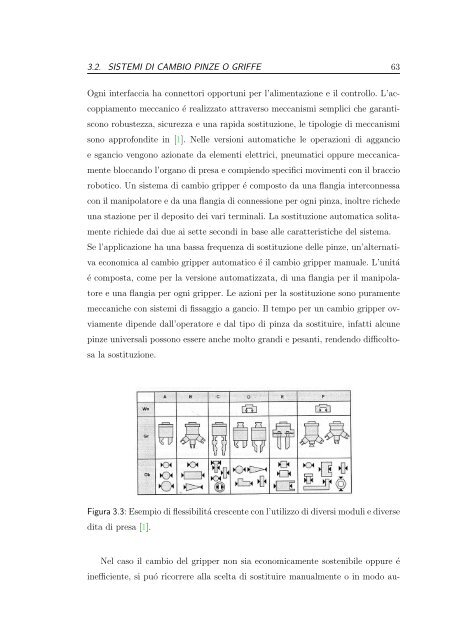
Figura 3.3: Esempio di flessibilitá crescente con l’utilizzo di diversi moduli e diverse<br />
dita di presa [1].<br />
Nel caso il cambio del gripper non sia economicamente sostenibile oppure é<br />
inefficiente, si puó ricorrere alla scelta di sostituire manualmente o in modo au-













