


Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
40 1. ORGANI DI PRESA: TIPOLOGIE E CARATTERISTICHE<br />
I sensori tattili a matrice vengono generalmente installati su ogni superficie<br />
utile delle dita di presa consentendo cosí di determinare e modificare l’accuratezza<br />
della presa. L’elevato costo e il complesso controllo di questi sensori trova campo<br />
principalmente su mani robotiche antropomorfe ad uso non industriale, come la<br />
SDH della Schunk o la Barret-Hand.<br />
1.8.3 Sensori di forza/coppia<br />
La misura di coppia é un elemento importante per il controllo delle operazioni<br />
di un organo di presa. I sensori di forza/coppia sono generalmente montati tra<br />
il gripper e la flangia di fissaggio. Questi sensori sono composti da un elemento<br />
deformabile di varia struttura e da componenti sensibili a tale deformazione<br />
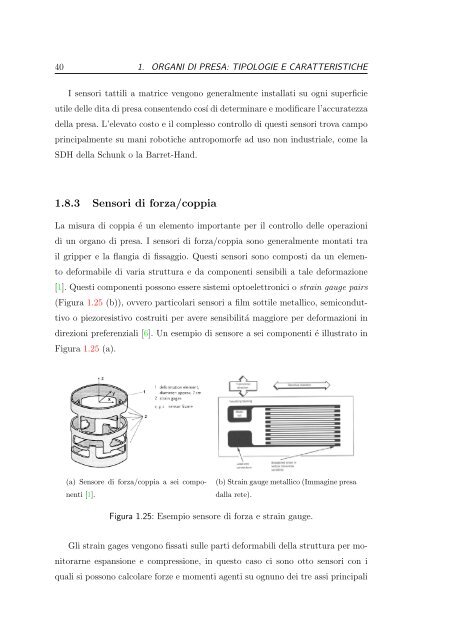
[1]. Questi componenti possono essere sistemi optoelettronici o strain gauge pairs<br />
(Figura 1.25 (b)), ovvero particolari sensori a film sottile metallico, semiconduttivo<br />
o piezoresistivo costruiti per avere sensibilitá maggiore per deformazioni in<br />
direzioni preferenziali [6]. Un esempio di sensore a sei componenti é illustrato in<br />
Figura 1.25 (a).<br />
(a) Sensore di forza/coppia a sei componenti<br />
[1].<br />
(b) Strain gauge metallico (Immagine presa<br />
dalla rete).<br />
Figura 1.25: Esempio sensore di forza e strain gauge.<br />
Gli strain gages vengono fissati sulle parti deformabili della struttura per monitorarne<br />
espansione e compressione, in questo caso ci sono otto sensori con i<br />
quali si possono calcolare forze e momenti agenti su ognuno dei tre assi principali













