- Page 1 and 2:
Brugermanual IRC5 med FlexPendant I
- Page 3 and 4:
Oplysningerne i denne manual kan æ
- Page 5 and 6:
Indholdsfortegnelse 4 3.2.2.3 Udfø
- Page 7 and 8:
Indholdsfortegnelse 6 3.4.10 Hænde
- Page 9 and 10:
Indholdsfortegnelse 8 3HAC 16590-8
- Page 11 and 12:
Oversigt Revisioner 10 Reference Do
- Page 13 and 14:
Produktdokumentation, M2004 Applika
- Page 15 and 16:
1 Sikkerhed 1.2. Anvendte sikkerhed
- Page 17 and 18:
1 Sikkerhed 1.3.1. Sikkerhedssymbol
- Page 19 and 20:
1 Sikkerhed 1.3.2.2. FARE - de bev
- Page 21 and 22:
1 Sikkerhed 1.3.3.1. ADVARSEL - Enh
- Page 23 and 24:
1 Sikkerhed 1.3.4. Hvad er et nøds
- Page 25 and 26:
1 Sikkerhed 1.3.6. Hvad er sikkerhe
- Page 27 and 28:
1 Sikkerhed 1.4.1. Standsning af sy
- Page 29 and 30:
1 Sikkerhed 1.4.3. Brandslukning 1.
- Page 31 and 32:
1 Sikkerhed 1.4.5. Tilbagevenden ti
- Page 33 and 34:
1 Sikkerhed 1.5.2. For din egen sik
- Page 35 and 36:
1 Sikkerhed 1.5.4. Sikkerhedsværkt
- Page 37 and 38:
1 Sikkerhed 1.5.6. Sikkerhed i auto
- Page 39 and 40:
2 Handlinger og situationer 2.2. St
- Page 41 and 42:
2 Handlinger og situationer 2.3. Jo
- Page 43 and 44:
2 Handlinger og situationer 2.4. Br
- Page 45 and 46:
2 Handlinger og situationer 2.5. Ar
- Page 47 and 48:
2 Handlinger og situationer 2.7. K
- Page 49 and 50:
2 Handlinger og situationer 2.9. In
- Page 51 and 52:
2 Handlinger og situationer 2.11. H
- Page 53 and 54:
2 Handlinger og situationer 2.11. H
- Page 55 and 56:
2 Handlinger og situationer 2.12. G
- Page 57 and 58:
3 FlexPendant 3.2.1. Hvad er en Fle
- Page 59 and 60:
3 FlexPendant 3.2.1. Hvad er en Fle
- Page 61 and 62:
3 FlexPendant 3.2.2.1. Sådan bruge
- Page 63 and 64: 3 FlexPendant 3.2.2.3. Udførelse a
- Page 65 and 66: 3 FlexPendant 3.2.2.3. Udførelse a
- Page 67 and 68: 3 FlexPendant 3.2.3.2. Tilslutning
- Page 69 and 70: 3 FlexPendant 3.2.4.1. Brug af soft
- Page 71 and 72: 3 FlexPendant 3.2.4.2. Sådan rulle
- Page 73 and 74: 3 FlexPendant 3.3.1. Oversigt, tilp
- Page 75 and 76: 3 FlexPendant 3.4.1.1. FlexPendant
- Page 77 and 78: 3 FlexPendant 3.4.2.1. Input og out
- Page 79 and 80: 3 FlexPendant 3.4.2.3. Visning af e
- Page 81 and 82: 3 FlexPendant 3.4.2.4. I/O-sikkerhe
- Page 83 and 84: 3 FlexPendant 3.4.2.4. I/O-sikkerhe
- Page 85 and 86: 3 FlexPendant 3.4.3.2. Koordineret
- Page 87 and 88: 3 FlexPendant 3.4.3.4. Vinduet Jogg
- Page 89 and 90: 3 FlexPendant 3.4.3.5. Valg af meka
- Page 91 and 92: 3 FlexPendant 3.4.3.6. Valg af bev
- Page 93 and 94: 3 FlexPendant 3.4.3.7. Angivelse af
- Page 95 and 96: 3 FlexPendant 3.4.3.8. Jogging akse
- Page 97 and 98: 3 FlexPendant 3.4.3.10. Jogging iht
- Page 99 and 100: 3 FlexPendant 3.4.3.11. Jogging iht
- Page 101 and 102: 3 FlexPendant 3.4.3.12. Jogging iht
- Page 103 and 104: 3 FlexPendant 3.4.3.13. Valg af væ
- Page 105 and 106: 3 FlexPendant 3.4.3.14. Oprettelse
- Page 107 and 108: 3 FlexPendant 3.4.3.15. Redigering
- Page 109 and 110: 3 FlexPendant 3.4.3.16. Redigering
- Page 111 and 112: 3 FlexPendant 3.4.3.18. Konfigurati
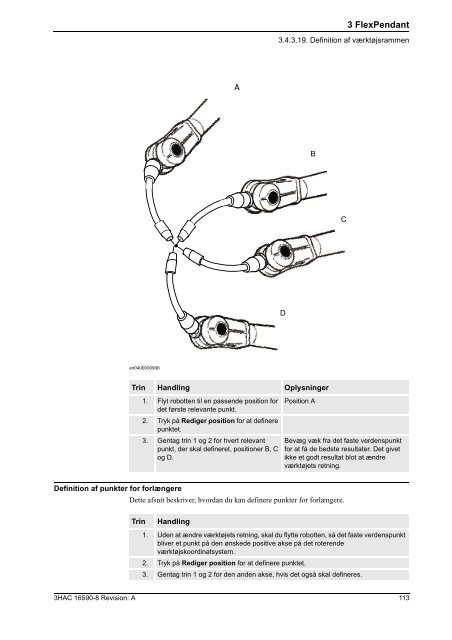
- Page 113: 3 FlexPendant 3.4.3.19. Definition
- Page 117 and 118: 3 FlexPendant 3.4.3.22. Redigering
- Page 119 and 120: 3 FlexPendant 3.4.3.24. Definition
- Page 121 and 122: 3 FlexPendant 3.4.3.24. Definition
- Page 123 and 124: 3 FlexPendant 3.4.3.25. Opret en ny
- Page 125 and 126: 3 FlexPendant 3.4.3.27. Redigering
- Page 127 and 128: 3 FlexPendant 3.4.3.29. Låsning af
- Page 129 and 130: 3 FlexPendant 3.4.3.30. Præcis pos
- Page 131 and 132: 3 FlexPendant 3.4.3.31. Sådan læs
- Page 133 and 134: 3 FlexPendant 3.4.4.1. Produktionsv
- Page 135 and 136: 3 FlexPendant 3.4.5.2. Visning af d
- Page 137 and 138: 3 FlexPendant 3.4.5.3. Oprettelse a
- Page 139 and 140: 3 FlexPendant 3.4.5.4. Redigering a
- Page 141 and 142: 3 FlexPendant 3.4.5.4. Redigering a
- Page 143 and 144: 3 FlexPendant 3.4.5.5. Sletning, æ
- Page 145 and 146: 3 FlexPendant 3.4.5.5. Sletning, æ
- Page 147 and 148: 3 FlexPendant 3.4.6.2. Oprettelse a
- Page 149 and 150: 3 FlexPendant 3.4.6.3. Håndtering
- Page 151 and 152: 3 FlexPendant 3.4.6.3. Håndtering
- Page 153 and 154: 3 FlexPendant 3.4.6.4. Start af pro
- Page 155 and 156: 3 FlexPendant 3.4.6.5. Kørsel af p
- Page 157 and 158: 3 FlexPendant 3.4.6.6. Standsning a
- Page 159 and 160: 3 FlexPendant 3.4.6.7. Indlæsning,
- Page 161 and 162: 3 FlexPendant 3.4.6.8. Sletning af
- Page 163 and 164: 3 FlexPendant 3.4.6.10. Visning af
- Page 165 and 166:
3 FlexPendant 3.4.6.11. Håndtering
- Page 167 and 168:
3 FlexPendant 3.4.6.11. Håndtering
- Page 169 and 170:
3 FlexPendant 3.4.6.13. Håndtering
- Page 171 and 172:
3 FlexPendant 3.4.6.13. Håndtering
- Page 173 and 174:
3 FlexPendant 3.4.6.13. Håndtering
- Page 175 and 176:
3 FlexPendant 3.4.6.14. Udførelse
- Page 177 and 178:
3 FlexPendant 3.4.6.15. Spejling af
- Page 179 and 180:
3 FlexPendant 3.4.6.16. Slukning af
- Page 181 and 182:
3 FlexPendant 3.4.6.17. Håndtering
- Page 183 and 184:
3 FlexPendant 3.4.6.17. Håndtering
- Page 185 and 186:
3 FlexPendant 3.4.6.17. Håndtering
- Page 187 and 188:
3 FlexPendant 3.4.6.17. Håndtering
- Page 189 and 190:
3 FlexPendant 3.4.6.19. Skjul erkl
- Page 191 and 192:
3 FlexPendant 3.4.6.20. Lagring af
- Page 193 and 194:
3 FlexPendant 3.4.6.21. Indstilling
- Page 195 and 196:
3 FlexPendant 3.4.7.1. Hvad gemmes
- Page 197 and 198:
3 FlexPendant 3.4.7.2. Sikkerhedsko
- Page 199 and 200:
3 FlexPendant 3.4.7.3. Gendannelse
- Page 201 and 202:
3 FlexPendant 3.4.7.4. Vigtige oply
- Page 203 and 204:
3 FlexPendant 3.4.8.1. Kalibrering
- Page 205 and 206:
3 FlexPendant 3.4.8.3. Opdatering a
- Page 207 and 208:
3 FlexPendant 3.4.8.3. Opdatering a
- Page 209 and 210:
3 FlexPendant 3.4.8.5. Redigering a
- Page 211 and 212:
3 FlexPendant 3.4.8.6. Finkalibreri
- Page 213 and 214:
3 FlexPendant 3.4.8.7. SMB-hukommel
- Page 215 and 216:
3 FlexPendant 3.4.8.8. Bundramme 3.
- Page 217 and 218:
3 FlexPendant 3.4.8.8. Bundramme 21
- Page 219 and 220:
3 FlexPendant 3.4.9.2. Redigering a
- Page 221 and 222:
3 FlexPendant 3.4.9.3. Sådan skift
- Page 223 and 224:
3 FlexPendant 3.4.9.4. Konfiguratio
- Page 225 and 226:
3 FlexPendant 3.4.9.5. Redigering a
- Page 227 and 228:
3 FlexPendant 3.4.9.7. Sprogskift 3
- Page 229 and 230:
3 FlexPendant 3.4.9.8. Programmerba
- Page 231 and 232:
3 FlexPendant 3.4.9.9. Overvågning
- Page 233 and 234:
3 FlexPendant 3.4.9.10. Konfigurati
- Page 235 and 236:
3 FlexPendant 3.4.10.1. Åbning og
- Page 237 and 238:
3 FlexPendant 3.4.10.3. Visning af
- Page 239 and 240:
3 FlexPendant 3.4.10.5. Lagring af
- Page 241 and 242:
3 FlexPendant 3.4.11.1. Låsning af
- Page 243 and 244:
3 FlexPendant 3.4.13.1. Systemoplys
- Page 245 and 246:
3 FlexPendant 3.4.14.2. Brug af Boo
- Page 247 and 248:
3 FlexPendant 3.4.14.2. Brug af Boo
- Page 249 and 250:
3 FlexPendant 3.4.14.3. Genstart og
- Page 251 and 252:
3 FlexPendant 3.4.14.5. Genstart og
- Page 253 and 254:
3 FlexPendant 3.4.14.7. Genstart an
- Page 255 and 256:
3 FlexPendant 3.4.14.9. Reflashing
- Page 257 and 258:
3 FlexPendant 3.4.15.1. Sådan logg
- Page 259 and 260:
3 FlexPendant 3.5.1. Statuslinje 3.
- Page 261 and 262:
3 FlexPendant 3.5.3. Hvordan kan je
- Page 263 and 264:
3 FlexPendant 3.6.1. Menuen Hurtig
- Page 265 and 266:
3 FlexPendant 3.6.2.1. Menuen Hurti
- Page 267 and 268:
3 FlexPendant 3.6.3.1. Menuen Hurti
- Page 269 and 270:
3 FlexPendant 3.6.4.1. Menuen Hurti
- Page 271 and 272:
3 FlexPendant 3.6.5.1. Menuen Hurti
- Page 273 and 274:
3 FlexPendant 3.6.6.1. Menuen Hurti
- Page 275 and 276:
4 Kontrolskab 4.2.1. Knapper på Fl
- Page 277 and 278:
4 Kontrolskab 4.2.2. Tilslutning af
- Page 279 and 280:
4 Kontrolskab 4.2.3. Konfiguration
- Page 281 and 282:
4 Kontrolskab 4.3.1. Aktuel driftst
- Page 283 and 284:
4 Kontrolskab 4.3.2.2. Opstart i au
- Page 285 and 286:
4 Kontrolskab 4.3.2.3. Kørsel af p
- Page 287 and 288:
4 Kontrolskab 4.3.3.1. Om manuel ti
- Page 289 and 290:
4 Kontrolskab 4.3.3.3. Kørsel af p
- Page 291 and 292:
4 Kontrolskab 4.3.3.5. Skift til ma
- Page 293 and 294:
5 Beskrivelser af udtryk og begrebe
- Page 295 and 296:
5 Beskrivelser af udtryk og begrebe
- Page 297 and 298:
5 Beskrivelser af udtryk og begrebe
- Page 299 and 300:
5 Beskrivelser af udtryk og begrebe
- Page 301 and 302:
5 Beskrivelser af udtryk og begrebe
- Page 303 and 304:
5 Beskrivelser af udtryk og begrebe
- Page 305 and 306:
5 Beskrivelser af udtryk og begrebe
- Page 307 and 308:
5 Beskrivelser af udtryk og begrebe
- Page 309 and 310:
5 Beskrivelser af udtryk og begrebe
- Page 311 and 312:
5 Beskrivelser af udtryk og begrebe
- Page 313:
Indeks T tilpasse 72 tilslutte en p