

Brugermanual
Brugermanual
Brugermanual

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2 Handlinger og situationer<br />
2.2. Start af systemet<br />
2.2. Start af systemet<br />
Forudsætninger<br />
Start af systemet<br />
38<br />
Nedenstående vejledning beskriver de vigtigste trin ved start af systemet, når strømmen er<br />
slået fra.<br />
Oplysningerne forudsætter, at fungerende systemsoftware på forhånd er installeret på<br />
kontrolskabet. Det er normalt tilfældet, når systemet startes første gang efter, at det er blevet<br />
leveret.<br />
Bemærk, at der kan være flere oplysninger tilgængelige end dem, som omtales i proceduren.<br />
Kapitlerne Kontrolskab på side 273 og FlexPendant på side 55 i brugermanualen - IRC5 med<br />
FlexPendant eller kapitlet Udførlige procedurer i dokumentet Introduktion - IRC5 og<br />
RobotStudio Online indeholder udførlige oplysninger om brugen af systemet.<br />
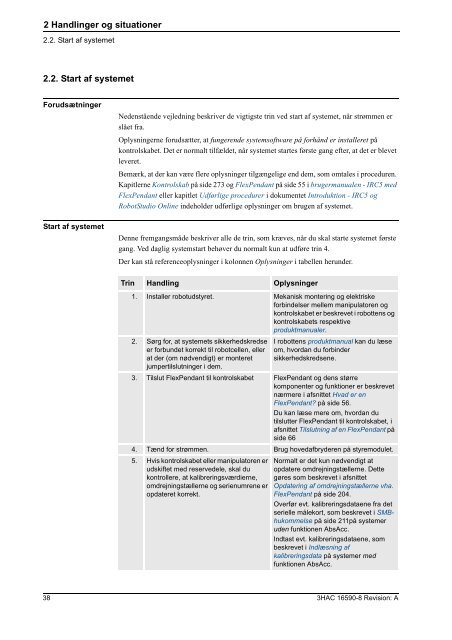
Denne fremgangsmåde beskriver alle de trin, som kræves, når du skal starte systemet første<br />
gang. Ved daglig systemstart behøver du normalt kun at udføre trin 4.<br />
Der kan stå referenceoplysninger i kolonnen Oplysninger i tabellen herunder.<br />
Trin Handling Oplysninger<br />
1. Installer robotudstyret. Mekanisk montering og elektriske<br />
forbindelser mellem manipulatoren og<br />
kontrolskabet er beskrevet i robottens og<br />
kontrolskabets respektive<br />
produktmanualer.<br />
2. Sørg for, at systemets sikkerhedskredse<br />
er forbundet korrekt til robotcellen, eller<br />
at der (om nødvendigt) er monteret<br />
jumpertilslutninger i dem.<br />
I robottens produktmanual kan du læse<br />
om, hvordan du forbinder<br />
sikkerhedskredsene.<br />
3. Tilslut FlexPendant til kontrolskabet FlexPendant og dens større<br />
komponenter og funktioner er beskrevet<br />
nærmere i afsnittet Hvad er en<br />
FlexPendant? på side 56.<br />
Du kan læse mere om, hvordan du<br />
tilslutter FlexPendant til kontrolskabet, i<br />
afsnittet Tilslutning af en FlexPendant på<br />
side 66<br />
4. Tænd for strømmen. Brug hovedafbryderen på styremodulet.<br />
5. Hvis kontrolskabet eller manipulatoren er<br />
udskiftet med reservedele, skal du<br />
kontrollere, at kalibreringsværdierne,<br />
omdrejningstællerne og serienumrene er<br />
opdateret korrekt.<br />
Normalt er det kun nødvendigt at<br />
opdatere omdrejningstællerne. Dette<br />
gøres som beskrevet i afsnittet<br />
Opdatering af omdrejningstællerne vha.<br />
FlexPendant på side 204.<br />
Overfør evt. kalibreringsdataene fra det<br />
serielle målekort, som beskrevet i SMBhukommelse<br />
på side 211på systemer<br />
uden funktionen AbsAcc.<br />
Indtast evt. kalibreringsdataene, som<br />
beskrevet i Indlæsning af<br />
kalibreringsdata på systemer med<br />
funktionen AbsAcc.<br />
3HAC 16590-8 Revision: A














