

Brugermanual
Brugermanual
Brugermanual

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Relative n-punkter<br />
3HAC 16590-8 Revision: A<br />
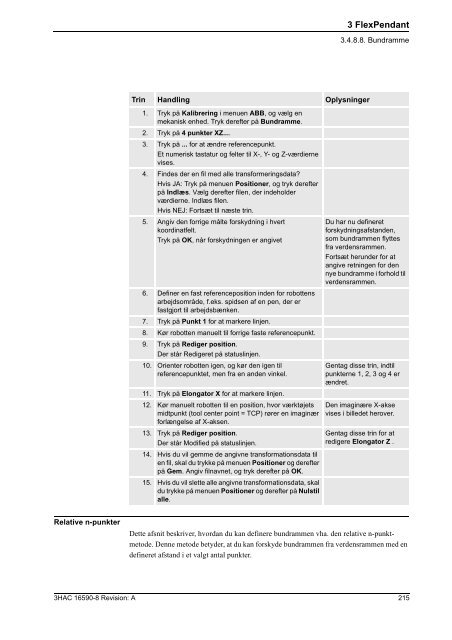
Trin Handling Oplysninger<br />
1. Tryk på Kalibrering i menuen ABB, og vælg en<br />
mekanisk enhed. Tryk derefter på Bundramme.<br />
2. Tryk på 4 punkter XZ....<br />
3. Tryk på ... for at ændre referencepunkt.<br />
Et numerisk tastatur og felter til X-, Y- og Z-værdierne<br />
vises.<br />
4. Findes der en fil med alle transformeringsdata?<br />
Hvis JA: Tryk på menuen Positioner, og tryk derefter<br />
på Indlæs. Vælg derefter filen, der indeholder<br />
værdierne. Indlæs filen.<br />
Hvis NEJ: Fortsæt til næste trin.<br />
5. Angiv den forrige målte forskydning i hvert<br />
koordinatfelt.<br />
Tryk på OK, når forskydningen er angivet<br />
6. Definer en fast referenceposition inden for robottens<br />
arbejdsområde, f.eks. spidsen af en pen, der er<br />
fastgjort til arbejdsbænken.<br />
7. Tryk på Punkt 1 for at markere linjen.<br />
8. Kør robotten manuelt til forrige faste referencepunkt.<br />
9. Tryk på Rediger position.<br />
Der står Redigeret på statuslinjen.<br />
10. Orienter robotten igen, og kør den igen til<br />
referencepunktet, men fra en anden vinkel.<br />
11. Tryk på Elongator X for at markere linjen.<br />
12. Kør manuelt robotten til en position, hvor værktøjets<br />
midtpunkt (tool center point = TCP) rører en imaginær<br />
forlængelse af X-aksen.<br />
13. Tryk på Rediger position.<br />
Der står Modified på statuslinjen.<br />
14. Hvis du vil gemme de angivne transformationsdata til<br />
en fil, skal du trykke på menuen Positioner og derefter<br />
på Gem. Angiv filnavnet, og tryk derefter på OK.<br />
15. Hvis du vil slette alle angivne transformationsdata, skal<br />
du trykke på menuen Positioner og derefter på Nulstil<br />
alle.<br />
3 FlexPendant<br />
3.4.8.8. Bundramme<br />
Du har nu defineret<br />
forskydningsafstanden,<br />
som bundrammen flyttes<br />
fra verdensrammen.<br />
Fortsæt herunder for at<br />
angive retningen for den<br />
nye bundramme i forhold til<br />
verdensrammen.<br />
Gentag disse trin, indtil<br />
punkterne 1, 2, 3 og 4 er<br />
ændret.<br />
Den imaginære X-akse<br />
vises i billedet herover.<br />
Gentag disse trin for at<br />
redigere Elongator Z .<br />
Dette afsnit beskriver, hvordan du kan definere bundrammen vha. den relative n-punktmetode.<br />
Denne metode betyder, at du kan forskyde bundrammen fra verdensrammen med en<br />
defineret afstand i et valgt antal punkter.<br />
215














