

Brugermanual
Brugermanual
Brugermanual

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
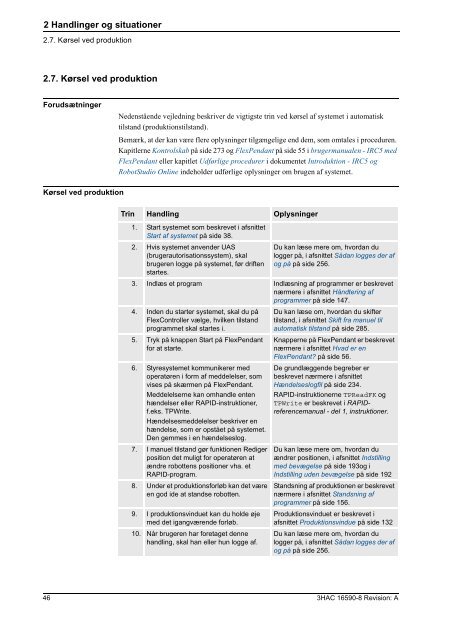
2 Handlinger og situationer<br />
2.7. Kørsel ved produktion<br />
2.7. Kørsel ved produktion<br />
Forudsætninger<br />
Kørsel ved produktion<br />
46<br />
Nedenstående vejledning beskriver de vigtigste trin ved kørsel af systemet i automatisk<br />
tilstand (produktionstilstand).<br />
Bemærk, at der kan være flere oplysninger tilgængelige end dem, som omtales i proceduren.<br />
Kapitlerne Kontrolskab på side 273 og FlexPendant på side 55 i brugermanualen - IRC5 med<br />
FlexPendant eller kapitlet Udførlige procedurer i dokumentet Introduktion - IRC5 og<br />
RobotStudio Online indeholder udførlige oplysninger om brugen af systemet.<br />
Trin Handling Oplysninger<br />
1. Start systemet som beskrevet i afsnittet<br />
Start af systemet på side 38.<br />
2. Hvis systemet anvender UAS<br />
(brugerautorisationssystem), skal<br />
brugeren logge på systemet, før driften<br />
startes.<br />
Du kan læse mere om, hvordan du<br />
logger på, i afsnittet Sådan logges der af<br />
og på på side 256.<br />
3. Indlæs et program Indlæsning af programmer er beskrevet<br />
nærmere i afsnittet Håndtering af<br />
programmer på side 147.<br />
4. Inden du starter systemet, skal du på<br />
FlexController vælge, hvilken tilstand<br />
programmet skal startes i.<br />
5. Tryk på knappen Start på FlexPendant<br />
for at starte.<br />
6. Styresystemet kommunikerer med<br />
operatøren i form af meddelelser, som<br />
vises på skærmen på FlexPendant.<br />
Meddelelserne kan omhandle enten<br />
hændelser eller RAPID-instruktioner,<br />
f.eks. TPWrite.<br />
Hændelsesmeddelelser beskriver en<br />
hændelse, som er opstået på systemet.<br />
Den gemmes i en hændelseslog.<br />
7. I manuel tilstand gør funktionen Rediger<br />
position det muligt for operatøren at<br />
ændre robottens positioner vha. et<br />
RAPID-program.<br />
8. Under et produktionsforløb kan det være<br />
en god ide at standse robotten.<br />
9. I produktionsvinduet kan du holde øje<br />
med det igangværende forløb.<br />
10. Når brugeren har foretaget denne<br />
handling, skal han eller hun logge af.<br />
Du kan læse om, hvordan du skifter<br />
tilstand, i afsnittet Skift fra manuel til<br />
automatisk tilstand på side 285.<br />
Knapperne på FlexPendant er beskrevet<br />
nærmere i afsnittet Hvad er en<br />
FlexPendant? på side 56.<br />
De grundlæggende begreber er<br />
beskrevet nærmere i afsnittet<br />
Hændelseslogfil på side 234.<br />
RAPID-instruktionerne TPReadFK og<br />
TPWrite er beskrevet i RAPIDreferencemanual<br />
- del 1, instruktioner.<br />
Du kan læse mere om, hvordan du<br />
ændrer positionen, i afsnittet Indstilling<br />
med bevægelse på side 193og i<br />
Indstilling uden bevægelse på side 192<br />
Standsning af produktionen er beskrevet<br />
nærmere i afsnittet Standsning af<br />
programmer på side 156.<br />
Produktionsvinduet er beskrevet i<br />
afsnittet Produktionsvindue på side 132<br />
Du kan læse mere om, hvordan du<br />
logger på, i afsnittet Sådan logges der af<br />
og på på side 256.<br />
3HAC 16590-8 Revision: A














