

Segmentation of Stochastic Images using ... - Jacobs University
Segmentation of Stochastic Images using ... - Jacobs University
Segmentation of Stochastic Images using ... - Jacobs University

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Chapter 7 <strong>Stochastic</strong> Level Sets<br />
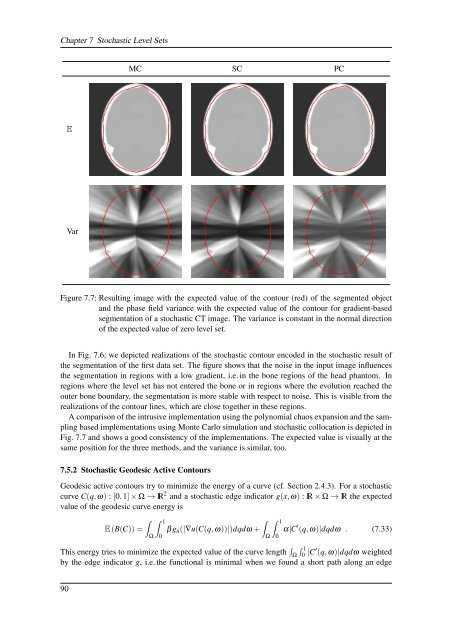
MC SC PC<br />
E<br />
Var<br />
Figure 7.7: Resulting image with the expected value <strong>of</strong> the contour (red) <strong>of</strong> the segmented object<br />
and the phase field variance with the expected value <strong>of</strong> the contour for gradient-based<br />
segmentation <strong>of</strong> a stochastic CT image. The variance is constant in the normal direction<br />
<strong>of</strong> the expected value <strong>of</strong> zero level set.<br />
In Fig. 7.6, we depicted realizations <strong>of</strong> the stochastic contour encoded in the stochastic result <strong>of</strong><br />
the segmentation <strong>of</strong> the first data set. The figure shows that the noise in the input image influences<br />
the segmentation in regions with a low gradient, i.e. in the bone regions <strong>of</strong> the head phantom. In<br />
regions where the level set has not entered the bone or in regions where the evolution reached the<br />
outer bone boundary, the segmentation is more stable with respect to noise. This is visible from the<br />
realizations <strong>of</strong> the contour lines, which are close together in these regions.<br />
A comparison <strong>of</strong> the intrusive implementation <strong>using</strong> the polynomial chaos expansion and the sampling<br />
based implementations <strong>using</strong> Monte Carlo simulation and stochastic collocation is depicted in<br />
Fig. 7.7 and shows a good consistency <strong>of</strong> the implementations. The expected value is visually at the<br />
same position for the three methods, and the variance is similar, too.<br />
7.5.2 <strong>Stochastic</strong> Geodesic Active Contours<br />
Geodesic active contours try to minimize the energy <strong>of</strong> a curve (cf. Section 2.4.3). For a stochastic<br />
curve C(q,ω) : [0,1] × Ω → IR 2 and a stochastic edge indicator g(x,ω) : IR × Ω → IR the expected<br />
value <strong>of</strong> the geodesic curve energy is<br />
∫ ∫ 1<br />
∫ ∫ 1<br />
E(B(C)) = βg u (|∇u(C(q,ω))|)dqdω + α|C ′ (q,ω)|dqdω . (7.33)<br />
Ω 0<br />
Ω 0<br />
This energy tries to minimize the expected value <strong>of</strong> the curve length ∫ Ω<br />
∫ 1<br />
0 |C′ (q,ω)|dqdω weighted<br />
by the edge indicator g, i.e. the functional is minimal when we found a short path along an edge<br />
90














