
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
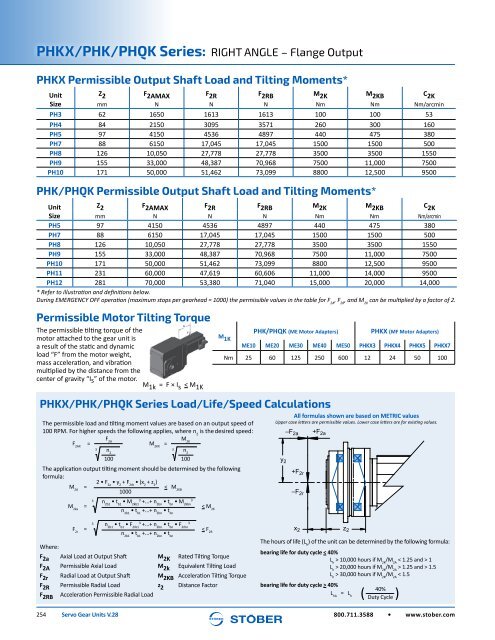
PHKX/PHK/PHQK Series: RIGHT ANGLE – Flange Output<br />
PHKX Permissible Output Shaft Load and Tilting Moments*<br />
Unit<br />
Size<br />
Z 2 F 2AMAX F 2R F 2RB M 2K M 2KB C 2K<br />
mm N N N Nm Nm Nm/arcmin<br />
PH3 62 1650 1613 1613 100 100 53<br />
PH4 84 2150 3095 3571 260 300 160<br />
PH5 97 4150 4536 4897 440 475 380<br />
PH7 88 6150 17,045 17,045 1500 1500 500<br />
PH8 126 10,050 27,778 27,778 3500 3500 1550<br />
PH9 155 33,000 48,387 70,968 7500 11,000 7500<br />
PH10 171 50,000 51,462 73,099 8800 12,500 9500<br />
PHK/PHQK Permissible Output Shaft Load and Tilting Moments*<br />
Unit<br />
Z 2 F 2AMAX F 2R F 2RB M 2K M 2KB C 2K<br />
Size<br />
mm N N N Nm Nm Nm/arcmin<br />
PH5 97 4150 4536 4897 440 475 380<br />
PH7 88 6150 17,045 17,045 1500 1500 500<br />
PH8 126 10,050 27,778 27,778 3500 3500 1550<br />
PH9 155 33,000 48,387 70,968 7500 11,000 7500<br />
PH10 171 50,000 51,462 73,099 8800 12,500 9500<br />
PH11 231 60,000 47,619 60,606 11,000 14,000 9500<br />
PH12 281 70,000 53,380 71,040 15,000 20,000 14,000<br />
* Refer to illustration and definitions below.<br />
During EMERGENCY OFF operation (maximum stops per gearhead = 1000) the permissible values in the table for F 2A<br />
, F 2R<br />
, and M 2K<br />
can be multiplied by a factor of 2.<br />
Permissible Motor Tilting Torque<br />
The permissible tilting torque of the<br />
F<br />
motor attached to the gear unit is<br />
a result of the static and dynamic<br />
load “F” from the motor weight,<br />
mass acceleration, and vibration<br />
multiplied by the distance from the<br />
center of gravity “Is” of the motor.<br />
M 1k = F × I s < M 1K<br />
PHKX/PHK/PHQK Series Load/Life/Speed Calculations<br />
The permissible load and tilting moment values are based on an output speed of<br />
100 RPM. For higher speeds the following applies, where n 2<br />
is the desired speed:<br />
F2AX =<br />
F 2A<br />
3 n 2<br />
100<br />
M 2KX<br />
=<br />
The application output tilting moment should be determined by the following<br />
formula:<br />
2 • F 2a<br />
• y 2<br />
+ F 2rb<br />
• (x 2<br />
+ z 2<br />
)<br />
M 2A<br />
= < M 1000<br />
2KB<br />
3 n 2b1<br />
• t b1<br />
• M 2kb1<br />
3<br />
+...+ n 2bn<br />
• t bn<br />
• M 2kbn<br />
3<br />
M 2ka<br />
= < M 2K<br />
n2b1 • t b1<br />
+...+ n 2bn<br />
• t bn<br />
Is<br />
M 2K<br />
3 n 2<br />
100<br />
M 1K<br />
PHK/PHQK (ME Motor Adapters) PHKX (MF Motor Adapters)<br />
ME10 ME20 ME30 ME40 ME50 PHKX3 PHKX4 PHKX5 PHKX7<br />
Nm 25 60 125 250 600 12 24 50 100<br />
All formulas shown are based on METRIC values<br />
Upper case letters are permissible values. Lower case letters are for existing values.<br />
y 2<br />
–F 2a<br />
+F 2r<br />
–F 2r<br />
+F 2a<br />
Where:<br />
F 2a Axial Load at Output Shaft M 2K Rated Tilting Torque<br />
F 2A Permissible Axial Load M 2k Equivalent Tilting Load<br />
F 2r Radial Load at Output Shaft M 2KB Acceleration Tilting Torque<br />
F 2R Permissible Radial Load z 2 Distance Factor<br />
F 2RB<br />
3 n 2b1<br />
• t b1<br />
• F 2rb1<br />
3<br />
+...+ n 2bn<br />
• t bn<br />
• F 2rbn<br />
3<br />
F 2r<br />
= < F 2R<br />
n2b1 • t b1<br />
+...+ n 2bn<br />
• t bn<br />
Acceleration Permissible Radial Load<br />
254 <strong>Servo</strong> <strong>Gear</strong> <strong>Units</strong> V.28<br />
x 2<br />
z 2<br />
The hours of life (L h<br />
) of the unit can be determined by the following formula:<br />
bearing life for duty cycle < 40%<br />
L h<br />
> 10,000 hours if M 2K<br />
/M 2A<br />
< 1.25 and > 1<br />
L h<br />
> 20,000 hours if M 2K<br />
/M 2A<br />
> 1.25 and > 1.5<br />
L h<br />
> 30,000 hours if M 2K<br />
/M 2A<br />
< 1.5<br />
bearing life for duty cycle > 40%<br />
L hA<br />
= L h<br />
40%<br />
( Duty Cycle )<br />
800.711.3588 • www.stober.com