AsseMec120_MAGGIU_2017

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
“full body” per l’utilizzo negli ambiti industriali con l’obiettivo<br />
di supportare gli addetti al carico-scarico nella<br />
movimentazione di carichi pesanti (disassemblamento,<br />
logistica, linee di produzione, ecc.). Riducendo il rischio<br />
di problemi muscolari, questo sistema favorisce la flessibilità,<br />
e in ultima analisi, aumenta il rendimento e la<br />
qualità dei processi produttivi, proteggendo la salute<br />
dei lavoratori.<br />
Interfaccia intelligente e user-friendly<br />
Robo-Mate è un esoscheletro robotizzato modulare,<br />
leggero e indossabile con un’interfaccia intelligente e<br />
user-friendly. Consta di tre moduli (per renderlo adattabile<br />
a diversi settori industriali e per molteplici compiti):<br />
braccia, tronco e interfaccia di controllo (HMI).<br />
Ciascun modulo può essere usato indipendentemente,<br />
o insieme agli altri, a seconda dell’attività dell’operatore.<br />
Il tronco è stato sviluppato nel dipartimento di Advanced<br />
Robotics dell’Istituto Italiano di Tecnologia di<br />
Genova (IIT), con l’obiettivo di ridurre il carico muscolare<br />
sulla schiena del lavoratore applicando una coppia<br />
assistiva al livello dell’anca.<br />
Per la progettazione e lo sviluppo dell’intero sistema, è<br />
n TECHNIQUE<br />
From Robotic<br />
Technology a Valid<br />
Help for Workers<br />
The Robo-Mate project, relying on European<br />
Union Funds, brought to the manufacturing<br />
of a “full body” exoskeleton aimed at helping<br />
industrial workers managing heavy workload.<br />
The robotized exoskeleton trunk - modular,<br />
lightweight and wearable with intelligent and<br />
user-friendly interface - was developed at the<br />
Department of Advanced Robotics of the IIT<br />
based in Genoa.<br />
I partner di Robo-Mate<br />
Il progetto include dodici partner, dall’ambito industriale a quello<br />
accademico, provenenti da sette Paesi Europei diversi. Il consorzio<br />
include i principali esperti nel settore, creando una formula unica che<br />
permette di affrontare le sfide coinvolte nella progettazione e sviluppo<br />
di esoscheletri per applicazioni industriali: accelopment AG, CH;<br />
Centro Ricerche Fiat S.c.p.A., IT; Compa S.A., RO;<br />
Fraunhofer-Gesellschaft zur Förderung der Angewandten Forschung<br />
e.V., DE; Güdel AG, CH; Indra SAS, FR; Istituto Italiano di Tecnologia,<br />
IIT; MRK-Systeme GmbH, DE; Ropardo SRL, RO; The Netherlands<br />
Organization for Applied Scientific Research, NL; University of Limerick,<br />
IE; Zurich University of Applied Science, CH (Coordinator).<br />
Robo-Mate Partners<br />
The project includes 12 partners from the industrial to academic field,<br />
coming from 7 different European countries. The consortium includes<br />
leading experts in the field, creating a unique formula that allows to<br />
take on the challenges involved in the design and development of<br />
exoskeletons for industrial applications: accelopment AG, CH; Centro<br />
Ricerche Fiat S.c.p.A., IT; Compa S.A., RO; Fraunhofer-Gesellschaft zur<br />
Förderung der Angewandten Forschung e.V., DE; Güdel AG, CH; Indra<br />
SAS, FR; Istituto Italiano di Tecnologia, IT; MRK-Systeme GmbH, DE;<br />
Ropardo SRL, RO; The Netherlands Organization for Applied Scientific<br />
Research, NL; University of Limerick, IE; Zurich University of Applied<br />
Science, CH (Coordinator).<br />
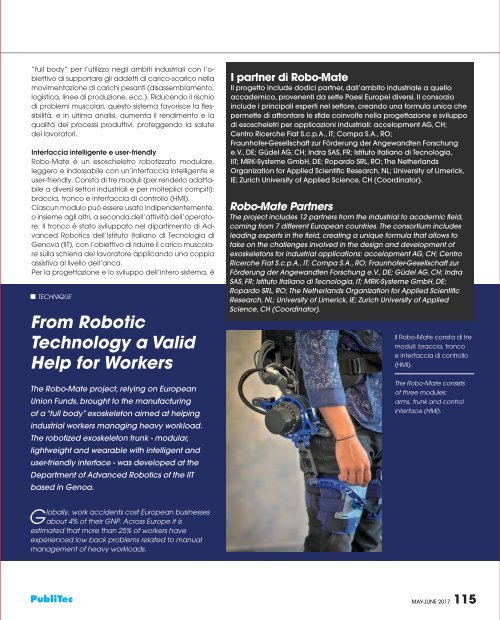
Il Robo-Mate consta di tre<br />
moduli: braccia, tronco<br />
e interfaccia di controllo<br />
(HMI).<br />
The Robo-Mate consists<br />
of three modules:<br />
arms, trunk and control<br />
interface (HMI).<br />
Globally, work accidents cost European businesses<br />
about 4% of their GNP. Across Europe it is<br />
estimated that more than 25% of workers have<br />
experienced low back problems related to manual<br />
management of heavy workloads.<br />
PubliTec MAY-JUNE <strong>2017</strong> 115