

Mathematics in Independent Component Analysis
Mathematics in Independent Component Analysis
Mathematics in Independent Component Analysis

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
1.4. Sparseness 29<br />
R 3<br />
R 3<br />
A<br />
BSRA<br />
R 2<br />
R 2<br />
f1 × f2<br />
g1 × g2<br />
Figure 3: Illustration of the proof of theorem ?? <strong>in</strong> the case n = 3, m = 2. The 3dimensional<br />
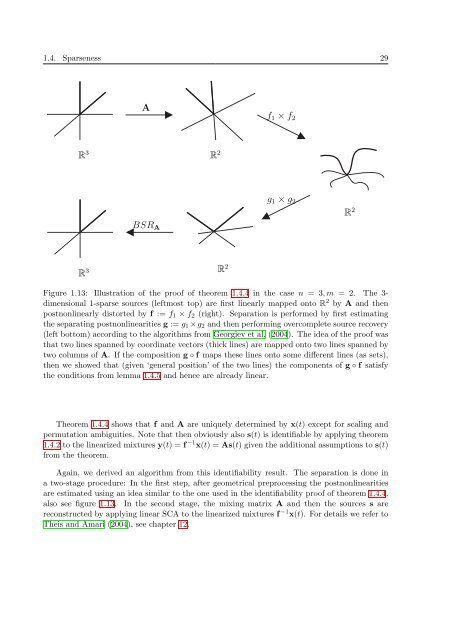
1-sparse sources (leftmost figure) are first l<strong>in</strong>early mapped onto R2 Figure 1.13: Illustration of the proof of theorem 1.4.4 <strong>in</strong> the case n = 3, m = 2. The 3dimensional<br />
1-sparse sources (leftmost top) are first l<strong>in</strong>early mapped onto R by<br />
A and then postnonl<strong>in</strong>early distorted by f := f1 × f2 (middle figure). Separation<br />
is performed by first estimat<strong>in</strong>g the separat<strong>in</strong>g postnonl<strong>in</strong>earities g := g1 × g2 and<br />
then perform<strong>in</strong>g overcomplete source recovery (right figure) accord<strong>in</strong>g to algorithm<br />
??. The idea of the proof now is that two l<strong>in</strong>es spanned by coord<strong>in</strong>ate vectors (fat<br />
l<strong>in</strong>es, leftmost figure) are mapped onto two l<strong>in</strong>es spanned by two columns of A.<br />
If the composition g ◦ f maps these l<strong>in</strong>es onto some different l<strong>in</strong>es (as sets), then<br />
we show that (given ’general position’ of the two l<strong>in</strong>es) the components of g ◦ f<br />
are homogeneous functions and hence already l<strong>in</strong>ear accord<strong>in</strong>g to lemma ??.<br />
2 by A and then<br />
postnonl<strong>in</strong>early distorted by f := f1 × f2 (right). Separation is performed by first estimat<strong>in</strong>g<br />
the separat<strong>in</strong>g postnonl<strong>in</strong>earities g := g1 ×g2 and then perform<strong>in</strong>g overcomplete source recovery<br />
(left bottom) accord<strong>in</strong>g to the algorithms from Georgiev et al. (2004). The idea of the proof was<br />
that two l<strong>in</strong>es spanned by coord<strong>in</strong>ate vectors (thick l<strong>in</strong>es) are mapped onto two l<strong>in</strong>es spanned by<br />
two columns of A. If the composition g ◦ f maps these l<strong>in</strong>es onto some different l<strong>in</strong>es (as sets),<br />
then we showed that (given ‘general position’ of the two l<strong>in</strong>es) the components of g ◦ f satisfy<br />
the conditions from lemma 1.4.5 and hence are already l<strong>in</strong>ear.<br />
Theorem 1.4.4 shows that f and A are uniquely determ<strong>in</strong>ed by x(t) except for scal<strong>in</strong>g and<br />
permutation ambiguities. Note that then obviously also s(t) is identifiable by apply<strong>in</strong>g theorem<br />
(i) s is fully k-sparse <strong>in</strong> the sense that im s equals the union of all k-dimensional<br />
1.4.2 to the l<strong>in</strong>earized mixtures y(t) = f<br />
coord<strong>in</strong>ate subspaces (<strong>in</strong> which it is conta<strong>in</strong>ed by the sparsity assumption),<br />
−1x(t) = As(t) given the additional assumptions to s(t)<br />
from the theorem.<br />
(ii) A is mix<strong>in</strong>g and not absolutely degenerate,<br />
(iii) every m × m-submatrix of A is <strong>in</strong>vertible.<br />
If x = ˆf( ˆs) is another representation of x as <strong>in</strong> equation ?? with ˆs satisfy<strong>in</strong>g the<br />
same conditions as s, then there exists an <strong>in</strong>vertible scal<strong>in</strong>g L with f = ˆ Aga<strong>in</strong>, we derived an algorithm from this identifiability result. The separation is done <strong>in</strong><br />
a two-stage procedure: In the first step, after geometrical preprocess<strong>in</strong>g the postnonl<strong>in</strong>earities<br />
are estimated us<strong>in</strong>g an idea similar to the one used <strong>in</strong> the identifiability proof of theorem 1.4.4,<br />
also see figure 1.13. In the second stage, the mix<strong>in</strong>g matrix A and then the sources s are<br />
reconstructed by apply<strong>in</strong>g l<strong>in</strong>ear SCA to the l<strong>in</strong>earized mixtures f<br />
f ◦ L, and<br />
−1x(t). For details we refer to<br />
Theis and Amari (2004), see chapter 12.<br />
<strong>in</strong>vertible scal<strong>in</strong>g and permutation matrices L ′ , P ′ with A = L ÂL′ P ′ .<br />
The proof is given <strong>in</strong> the appendix. It relies on the fact that when s is fully<br />
k-sparse as formulated <strong>in</strong> theorem ??(??), it <strong>in</strong>cludes all the k-dimensional coord<strong>in</strong>ate<br />
subspaces and hence <strong>in</strong>tersections of k such subspaces, which give the<br />
n coord<strong>in</strong>ate axes. They are transformed <strong>in</strong>to n curves <strong>in</strong> the x-space, pass<strong>in</strong>g<br />
through the orig<strong>in</strong>. By identification of these curves, we show that each nonl<strong>in</strong>earity<br />
is homogeneous and hence l<strong>in</strong>ear accord<strong>in</strong>g to the previous section. Figure<br />
?? gives an illustration of the proof of theorem ?? <strong>in</strong> the case n = 3 and m = 2.<br />
R 2














