Robotika - Ã…Â olski center Celje
Robotika - Ã…Â olski center Celje
Robotika - Ã…Â olski center Celje

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
.<br />
16 PROGRAMSKI JEZIKI<br />
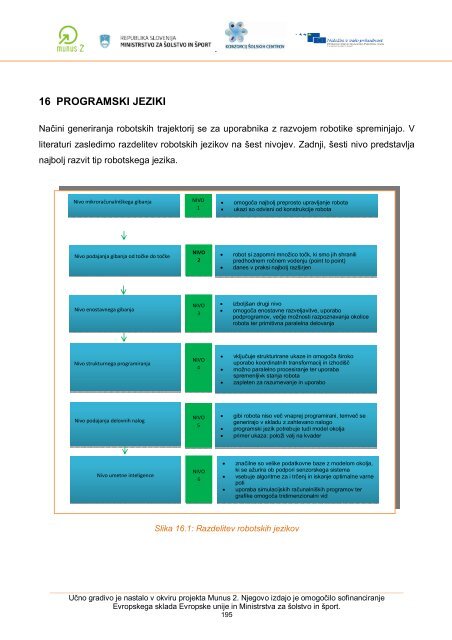
Načini generiranja robotskih trajektorij se za uporabnika z razvojem robotike spreminjajo. V<br />
literaturi zasledimo razdelitev robotskih jezikov na šest nivojev. Zadnji, šesti nivo predstavlja<br />
najbolj razvit tip robotskega jezika.<br />
Nivo mikroračunalniškega gibanja<br />
NIVO<br />
1<br />
<br />
<br />
omogoča najbolj preprosto upravljanje robota<br />
ukazi so odvisni od konstrukcije robota<br />
Nivo podajanja gibanja od točke do točke<br />
NIVO<br />
2<br />
<br />
<br />
robot si zapomni množico točk, ki smo jih shranili<br />
predhodnem ročnem vodenju (point to point)<br />
danes v praksi najbolj razširjen<br />
Nivo enostavnega gibanja<br />
NIVO<br />
3<br />
<br />
<br />
izboljšan drugi nivo<br />
omogoča enostavne razveljavitve, uporabo<br />
podprogramov, večje možnosti razpoznavanja okolice<br />
robota ter primitivna paralelna delovanja<br />
Nivo strukturnega programiranja<br />
NIVO<br />
4<br />
<br />
<br />
<br />
vključuje strukturirane ukaze in omogoča široko<br />
uporabo koordinatnih transformacij in izhodišč<br />
možno paralelno procesiranje ter uporaba<br />
spremenljivk stanja robota<br />
zapleten za razumevanje in uporabo<br />
Nivo podajanja delovnih nalog<br />
NIVO<br />
5<br />
<br />
<br />
<br />
gibi robota niso več vnaprej programirani, temveč se<br />
generirajo v skladu z zahtevano nalogo<br />
programski jezik potrebuje tudi model okolja<br />
primer ukaza: položi valj na kvader<br />
Nivo umetne inteligence<br />
NIVO<br />
6<br />
<br />
<br />
<br />
značilne so velike podatkovne baze z modelom okolja,<br />
ki se ažurira ob podpori senzorskega sistema<br />
vsebuje algoritme za i trčenj in iskanje optimalne varne<br />
poti<br />
uporaba simulacijskih računalniških programov ter<br />
grafike omogoča tridimenzionalni vid<br />
Slika 16.1: Razdelitev robotskih jezikov<br />
_____________________________________________________________________________________________<br />
Učno gradivo je nastalo v okviru projekta Munus 2. Njegovo izdajo je omogočilo sofinanciranje<br />
Evropskega sklada Evropske unije in Ministrstva za šolstvo in šport.<br />
195