F4200N Manual - Fisnar.fr
F4200N Manual - Fisnar.fr
F4200N Manual - Fisnar.fr

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>F4200N</strong> Operating <strong>Manual</strong><br />
Section 3: Teaching Overview<br />
Part # 562187N<br />
Rev. C Jun 2011<br />
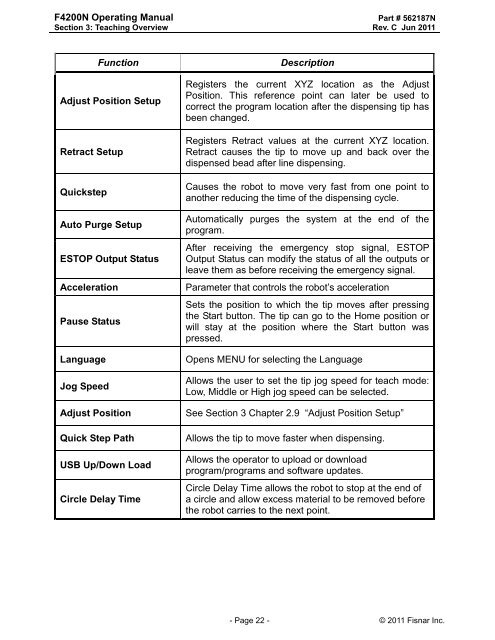
Function<br />
Adjust Position Setup<br />
Retract Setup<br />
Quickstep<br />
Auto Purge Setup<br />
ESTOP Output Status<br />
Acceleration<br />
Pause Status<br />
Language<br />
Jog Speed<br />
Adjust Position<br />
Quick Step Path<br />
USB Up/Down Load<br />
Circle Delay Time<br />
Description<br />
Registers the current XYZ location as the Adjust<br />
Position. This reference point can later be used to<br />
correct the program location after the dispensing tip has<br />
been changed.<br />
Registers Retract values at the current XYZ location.<br />
Retract causes the tip to move up and back over the<br />
dispensed bead after line dispensing.<br />
Causes the robot to move very fast <strong>fr</strong>om one point to<br />
another reducing the time of the dispensing cycle.<br />
Automatically purges the system at the end of the<br />
program.<br />
After receiving the emergency stop signal, ESTOP<br />
Output Status can modify the status of all the outputs or<br />
leave them as before receiving the emergency signal.<br />
Parameter that controls the robot‟s acceleration<br />
Sets the position to which the tip moves after pressing<br />
the Start button. The tip can go to the Home position or<br />
will stay at the position where the Start button was<br />
pressed.<br />
Opens MENU for selecting the Language<br />
Allows the user to set the tip jog speed for teach mode:<br />
Low, Middle or High jog speed can be selected.<br />
See Section 3 Chapter 2.9 “Adjust Position Setup”<br />
Allows the tip to move faster when dispensing.<br />
Allows the operator to upload or download<br />
program/programs and software updates.<br />
Circle Delay Time allows the robot to stop at the end of<br />
a circle and allow excess material to be removed before<br />
the robot carries to the next point.<br />
- Page 22 - © 2011 <strong>Fisnar</strong> Inc.