F4200N Manual - Fisnar.fr
F4200N Manual - Fisnar.fr
F4200N Manual - Fisnar.fr

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>F4200N</strong> Operating <strong>Manual</strong><br />
Section 5: Point Type & Function Reference<br />
Part # 562187N<br />
Rev. C Jun 2011<br />
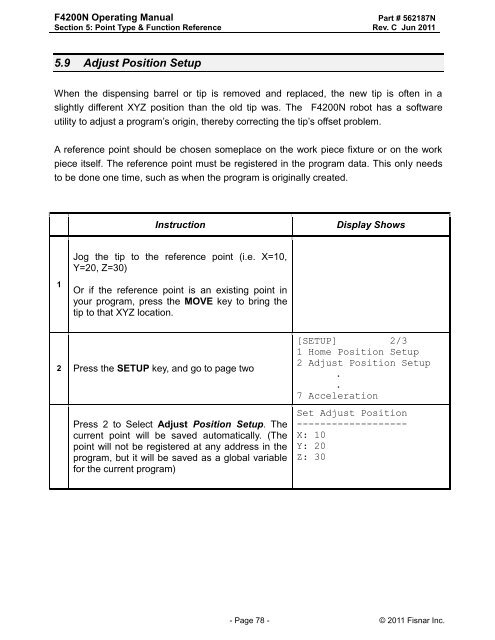
5.9 Adjust Position Setup<br />
When the dispensing barrel or tip is removed and replaced, the new tip is often in a<br />
slightly different XYZ position than the old tip was. The <strong>F4200N</strong> robot has a software<br />
utility to adjust a program‟s origin, thereby correcting the tip‟s offset problem.<br />
A reference point should be chosen someplace on the work piece fixture or on the work<br />
piece itself. The reference point must be registered in the program data. This only needs<br />
to be done one time, such as when the program is originally created.<br />
Instruction<br />
Display Shows<br />
Jog the tip to the reference point (i.e. X=10,<br />
Y=20, Z=30)<br />
1<br />
Or if the reference point is an existing point in<br />
your program, press the MOVE key to bring the<br />
tip to that XYZ location.<br />
2 Press the SETUP key, and go to page two<br />
Press 2 to Select Adjust Position Setup. The<br />
current point will be saved automatically. (The<br />
point will not be registered at any address in the<br />
program, but it will be saved as a global variable<br />
for the current program)<br />
[SETUP] 2/3<br />
1 Home Position Setup<br />
2 Adjust Position Setup<br />
.<br />
.<br />
7 Acceleration<br />
Set Adjust Position<br />
-------------------<br />
X: 10<br />
Y: 20<br />
Z: 30<br />
- Page 78 - © 2011 <strong>Fisnar</strong> Inc.