F4200N Manual - Fisnar.fr
F4200N Manual - Fisnar.fr
F4200N Manual - Fisnar.fr

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>F4200N</strong> Operating <strong>Manual</strong><br />
Section 6: Sample Programs<br />
Part # 562187N<br />
Rev. C Jun 2011<br />
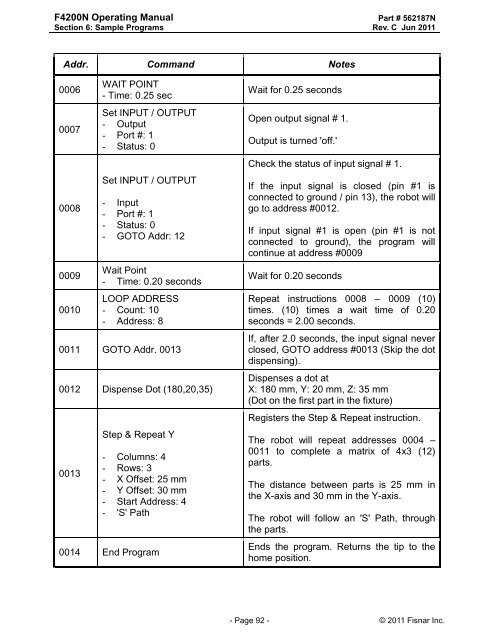
Addr. Command Notes<br />
0006<br />
0007<br />
0008<br />
0009<br />
0010<br />
WAIT POINT<br />
- Time: 0.25 sec<br />
Set INPUT / OUTPUT<br />
- Output<br />
- Port #: 1<br />
- Status: 0<br />
Set INPUT / OUTPUT<br />
- Input<br />
- Port #: 1<br />
- Status: 0<br />
- GOTO Addr: 12<br />
Wait Point<br />
- Time: 0.20 seconds<br />
LOOP ADDRESS<br />
- Count: 10<br />
- Address: 8<br />
0011 GOTO Addr. 0013<br />
0012 Dispense Dot (180,20,35)<br />
0013<br />
Step & Repeat Y<br />
- Columns: 4<br />
- Rows: 3<br />
- X Offset: 25 mm<br />
- Y Offset: 30 mm<br />
- Start Address: 4<br />
- 'S' Path<br />
0014 End Program<br />
Wait for 0.25 seconds<br />
Open output signal # 1.<br />
Output is turned 'off.'<br />
Check the status of input signal # 1.<br />
If the input signal is closed (pin #1 is<br />
connected to ground / pin 13), the robot will<br />
go to address #0012.<br />
If input signal #1 is open (pin #1 is not<br />
connected to ground), the program will<br />
continue at address #0009<br />
Wait for 0.20 seconds<br />
Repeat instructions 0008 – 0009 (10)<br />
times. (10) times a wait time of 0.20<br />
seconds = 2.00 seconds.<br />
If, after 2.0 seconds, the input signal never<br />
closed, GOTO address #0013 (Skip the dot<br />
dispensing).<br />
Dispenses a dot at<br />
X: 180 mm, Y: 20 mm, Z: 35 mm<br />
(Dot on the first part in the fixture)<br />
Registers the Step & Repeat instruction.<br />
The robot will repeat addresses 0004 –<br />
0011 to complete a matrix of 4x3 (12)<br />
parts.<br />
The distance between parts is 25 mm in<br />
the X-axis and 30 mm in the Y-axis.<br />
The robot will follow an 'S' Path, through<br />
the parts.<br />
Ends the program. Returns the tip to the<br />
home position.<br />
- Page 92 - © 2011 <strong>Fisnar</strong> Inc.