User Manual High Performance AC Drive
User Manual High Performance AC Drive
User Manual High Performance AC Drive
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
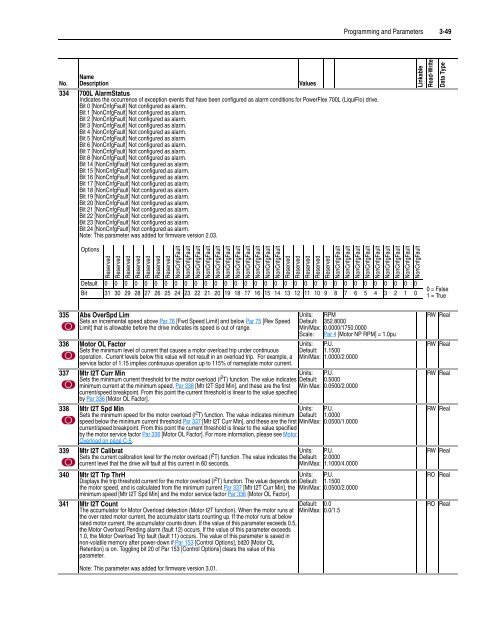
Programming and Parameters 3-49LinkableRead-WriteData TypeNameNo. DescriptionValues334 700L AlarmStatusIndicates the occurrence of exception events that have been configured as alarm conditions for PowerFlex 700L (LiquiFlo) drive.Bit 0 [NonCnfgFault] Not configured as alarm.Bit 1 [NonCnfgFault] Not configured as alarm.Bit 2 [NonCnfgFault] Not configured as alarm.Bit 3 [NonCnfgFault] Not configured as alarm.Bit 4 [NonCnfgFault] Not configured as alarm.Bit 5 [NonCnfgFault] Not configured as alarm.Bit 6 [NonCnfgFault] Not configured as alarm.Bit 7 [NonCnfgFault] Not configured as alarm.Bit 8 [NonCnfgFault] Not configured as alarm.Bit 14 [NonCnfgFault] Not configured as alarm.Bit 15 [NonCnfgFault] Not configured as alarm.Bit 16 [NonCnfgFault] Not configured as alarm.Bit 17 [NonCnfgFault] Not configured as alarm.Bit 18 [NonCnfgFault] Not configured as alarm.Bit 19 [NonCnfgFault] Not configured as alarm.Bit 20 [NonCnfgFault] Not configured as alarm.Bit 21 [NonCnfgFault] Not configured as alarm.Bit 22 [NonCnfgFault] Not configured as alarm.Bit 23 [NonCnfgFault] Not configured as alarm.Bit 24 [NonCnfgFault] Not configured as alarm.Note: This parameter was added for firmware version 2.03.OptionsReservedReservedReservedReservedReservedReservedReservedNonCnfgFaultNonCnfgFaultNonCnfgFaultNonCnfgFaultNonCnfgFaultNonCnfgFaultNonCnfgFaultNonCnfgFaultNonCnfgFaultNonCnfgFaultNonCnfgFaultReservedReservedReservedReservedReservedNonCnfgFaultNonCnfgFaultNonCnfgFaultNonCnfgFaultNonCnfgFaultNonCnfgFaultNonCnfgFaultNonCnfgFaultNonCnfgFaultDefault 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0Bit 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 00 = False1 = True335 Abs OverSpd LimSets an incremental speed above Par 76 [Fwd Speed Limit] and below Par 75 [Rev SpeedLimit] that is allowable before the drive indicates its speed is out of range.336 Motor OL FactorSets the minimum level of current that causes a motor overload trip under continuousoperation. Current levels below this value will not result in an overload trip. For example, aservice factor of 1.15 implies continuous operation up to 115% of nameplate motor current.Units: RPMDefault: 352.8000Min/Max: 0.0000/1750.0000Scale: Par 4 [Motor NP RPM] = 1.0puUnits: P.U.Default: 1.1500Min/Max: 1.0000/2.0000337 Mtr I2T Curr MinUnits: P.U.Sets the minimum current threshold for the motor overload (I 2 T) function. The value indicates Default: 0.5000minimum current at the minimum speed, Par 338 [Mtr I2T Spd Min], and these are the first Min Max: 0.0500/2.0000current/speed breakpoint. From this point the current threshold is linear to the value specifiedby Par 336 [Motor OL Factor].338 Mtr I2T Spd MinUnits: P.U.Sets the minimum speed for the motor overload (I 2 T) function. The value indicates minimum Default: 1.0000speed below the minimum current threshold Par 337 [Mtr I2T Curr Min], and these are the first Min/Max: 0.0500/1.0000current/speed breakpoint. From this point the current threshold is linear to the value specifiedby the motor service factor Par 336 [Motor OL Factor]. For more information, please see MotorOverload on page C-5.339 Mtr I2T CalibratUnits: P.U.Sets the current calibration level for the motor overload (I 2 T) function. The value indicates the Default: 2.0000current level that the drive will fault at this current in 60 seconds.Min/Max: 1.1000/4.0000340 Mtr I2T Trp ThrHUnits: P.U.Displays the trip threshold current for the motor overload (I 2 T) function. The value depends on Default: 1.1500the motor speed, and is calculated from the minimum current Par 337 [Mtr I2T Curr Min], the Min/Max: 0.0500/2.0000minimum speed [Mtr I2T Spd Min] and the motor service factor Par 336 [Motor OL Factor].341 Mtr I2T CountDefault: 0.0The accumulator for Motor Overload detection (Motor I2T function). When the motor runs at Min/Max: 0.0/1.5the over rated motor current, the accumulator starts counting up. If the motor runs at belowrated motor current, the accumulator counts down. If the value of this parameter exceeds 0.5,the Motor Overload Pending alarm (fault 12) occurs. If the value of this parameter exceeds1.0, the Motor Overload Trip fault (fault 11) occurs. The value of this parameter is saved innon-volatile memory after power-down if Par 153 [Control Options], bit20 [Motor OLRetention} is on. Toggling bit 20 of Par 153 [Control Options] clears the value of thisparameter.RW RealRW RealRW RealRW RealRW RealRO RealRO RealNote: This parameter was added for firmware version 3.01.