User Manual High Performance AC Drive
User Manual High Performance AC Drive
User Manual High Performance AC Drive
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
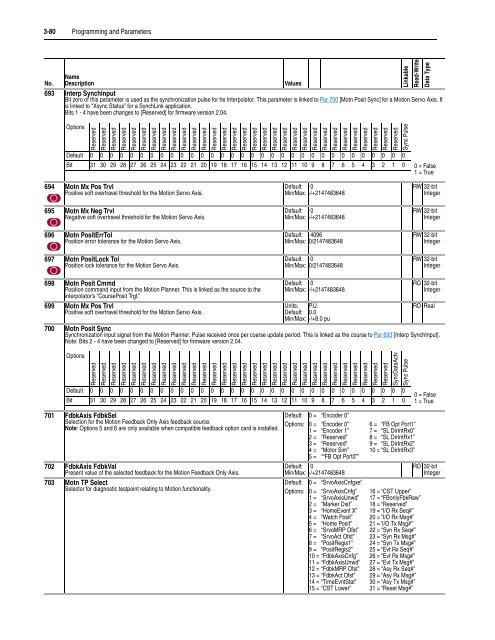
3-80 Programming and ParametersLinkableRead-WriteData TypeNameNo. DescriptionValues693 Interp SynchInputBit zero of this parameter is used as the synchronization pulse for he Interpolator. This parameter is linked to Par 700 [Motn Posit Sync] for a Motion Servo Axis. Itis linked to “Xsync Status” for a SynchLink application.Bits 1 - 4 have been changes to [Reserved] for firmware version 2.04.OptionsReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedSync PulseDefault 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0Bit 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 0 = False1 = True694 Motn Mx Pos TrvlPositive soft overtravel threshold for the Motion Servo Axis.695 Motn Mx Neg TrvlNegative soft overtravel threshold for the Motion Servo Axis.696 Motn PositErrTolPosition error tolerance for the Motion Servo Axis.697 Motn PositLock TolPosition lock tolerance for the Motion Servo Axis.Default: 0Min/Max: -/+2147483648Default: 0Min/Max: -/+2147483648Default: 4096Min/Max: 0/2147483648Default: 0Min/Max: 0/2147483648RW 32-bitIntegerRW 32-bitIntegerRW 32-bitIntegerRW 32-bitInteger698 Motn Posit CmmdPosition command input from the Motion Planner. This is linked as the source to theinterpolator’s “CoursePosit Trgt.”699 Motn Mx Pos TrvlPositive soft overtravel threshold for the Motion Servo Axis.Default: 0Min/Max: -/+2147483648Units: P.U.Default: 0.0Min/Max: -/+8.0 puRO 32-bitIntegerRO Real700 Motn Posit SyncSynchronization input signal from the Motion Planner. Pulse received once per coarse update period. This is linked as the course to Par 693 [Interp SynchInput].Note: Bits 2 - 4 have been changed to [Reserved] for firmware version 2.04.OptionsReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedSyncDataActvSync PulseDefault 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0Bit 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 00 = False1 = True701 FdbkAxis FdbkSelSelection for the Motion Feedback Only Axis feedback source.Note: Options 5 and 6 are only available when compatible feedback option card is installed.702 FdbkAxis FdbkValPresent value of the selected feedback for the Motion Feedback Only Axis.703 Motn TP SelectSelector for diagnostic testpoint relating to Motion functionality.Default:Options:0 =0 =1 =2 =3 =4 =5 =“Encoder 0”“Encoder 0”“Encoder 1”“Reserved”“Reserved”“Motor Sim”““FB Opt Port0””Default: 0Min/Max: -/+2147483648Default: 0 = “SrvoAxisCnfgxe”Options: 0 = “SrvoAxisCnfg”1 = “SrvoAxisUnwd”2 = “Marker Dist”3 = “HomeEvent X”4 = “Watch Posit”5 = “Home Posit”6 = “SrvoMRP Ofst”7 = “SrvoAct Ofst”8 = “PositRegis1”9 = “PositRegis2”10 = “FdbkAxisCnfg”11 = “FdbkAxisUnwd”12 = “FdbkMRP Ofst”13 = “FdbkAct Ofst”14 = “TimeEvntStat”15 = “CST Lower”6 = “FB Opt Port1”7 = “SL DirIntRx0”8 = “SL DirIntRx1”9 = “SL DirIntRx2”10 = “SL DirIntRx3”16 = “CST Upper”17 = “FBonlyFbkRaw”18 = “Reserved”19 = “I/O Rx Seq#”20 = ”I/O Rx Msg#”21 = 'I/O Tx Msg#”22 = “Syn Rx Seq#”23 = “Syn Rx Msg#”24 = “Syn Tx Msg#”25 = “Evt Rx Seq#”26 = “Evt Rx Msg#”27 = “Evt Tx Msg#”28 = “Asy Rx Seq#”29 = “Asy Rx Msg#”30 = “Asy Tx Msg#”31 = “Reset Msg#”RO 32-bitInteger