User Manual High Performance AC Drive
User Manual High Performance AC Drive
User Manual High Performance AC Drive
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
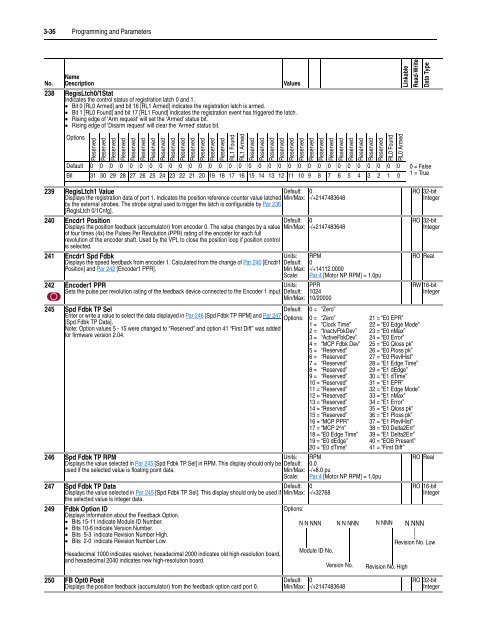
3-36 Programming and ParametersNameNo. DescriptionValues238 RegisLtch0/1StatIndicates the control status of registration latch 0 and 1.• Bit 0 [RL0 Armed] and bit 16 [RL1 Armed] indicates the registration latch is armed.• Bit 1 [RL0 Found] and bit 17 [RL1 Found] indicates the registration event has triggered the latch.• Rising edge of 'Arm request' will set the 'Armed' status bit.• Rising edge of 'Disarm request' will clear the 'Armed' status bit.OptionsReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedRL1 FoundRL1 ArmedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedRL0 FoundRL0 ArmedDefault 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0Bit 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0239 RegisLtch1 ValueDefault:Displays the registration data of port 1. Indicates the position reference counter value latched Min/Max:by the external strobes. The strobe signal used to trigger the latch is configurable by Par 236[RegisLtch 0/1Cnfg].240 Encdr1 PositionDefault:Displays the position feedback (accumulator) from encoder 0. The value changes by a value Min/Max:of four times (4x) the Pulses Per Revolution (PPR) rating of the encoder for each fullrevolution of the encoder shaft. Used by the VPL to close the position loop if position controlis selected.241 Encdr1 Spd FdbkUnits:Displays the speed feedback from encoder 1. Calculated from the change of Par 240 [Encdr1 Default:Position] and Par 242 [Encoder1 PPR].Min.Max:Scale:242 Encoder1 PPRUnits:Sets the pulse per revolution rating of the feedback device connected to the Encoder 1 input. Default:Min/Max:245 Spd Fdbk TP SelDefault:Enter or write a value to select the data displayed in Par 246 [Spd Fdbk TP RPM] and Par 247 Options:[Spd Fdbk TP Data].Note: Option values 5 - 15 were changed to “Reserved” and option 41 “First Diff” was addedfor firmware version 2.04.246 Spd Fdbk TP RPMUnits:Displays the value selected in Par 245 [Spd Fdbk TP Sel] in RPM. This display should only be Default:used if the selected value is floating point data.Min/Max:Scale:247 Spd Fdbk TP DataDefault:Displays the value selected in Par 245 [Spd Fdbk TP Sel]. This display should only be used if Min/Max:the selected value is integer data.249 Fdbk Option IDDisplays information about the Feedback Option.• Bits 15-11 indicate Module ID Number.• Bits 10-6 indicate Version Number.• Bits 5-3 indicate Revision Number <strong>High</strong>.• Bits 2-0 indicate Revision Number Low.Hexadecimal 1000 indicates resolver, hexadecimal 2000 indicates old high-resolution board,and hexadecimal 2040 indicates new high-resolution board.250 FB Opt0 PositDisplays the position feedback (accumulator) from the feedback option card port 0.Options:Default:Min/Max:0-/+21474836480-/+2147483648RPM0-/+14112.0000Par 4 [Motor NP RPM] = 1.0puPPR102410/200000 =0 =1 =2 =3 =4 =5 =6 =7 =8 =9 =10 =11 =12 =13 =14 =15 =16 =17 =18 =19 =20 =“Zero”“Zero”21 = “E0 EPR”“Clock Time” 22 = “E0 Edge Mode”“InactvFbkDev” 23 = “E0 nMax”“ActiveFbkDev” 24 = “E0 Error”“MCP Fdbk Dev” 25 = “E0 Qloss pk”“Reserved” 26 = “E0 Ploss pk”“Reserved” 27 = “E0 PlevlHist”“Reserved” 28 = “E1 Edge Time”“Reserved” 29 = “E1 dEdge”“Reserved” 30 = “E1 dTime”“Reserved” 31 = “E1 EPR”“Reserved” 32 = “E1 Edge Mode”“Reserved” 33 = “E1 nMax”“Reserved” 34 = “E1 Error”“Reserved” 35 = “E1 Qloss pk”“Reserved” 36 = “E1 Ploss pk”“MCP PPR” 37 = “E1 PlevlHist”“MCP 2^n” 38 = “E0 Delta2Err”“E0 Edge Time” 39 = “E1 Delta2Err”“E0 dEdge” 40 = “EOB Present”“E0 dTime” 41 = “First Diff”RPM0.0-/+8.0 puPar 4 [Motor NP RPM] = 1.0pu0-/+327680-/+2147483648LinkableRead-WriteData Type0 = False1 = TrueRO 32-bitIntegerRO 32-bitIntegerRO RealRW 16-bitIntegerRO RealN N NNN N N NNN N NNN N NNNModule ID No.Version No.Revision No. <strong>High</strong>RO 16-bitIntegerRevision No. LowRO 32-bitInteger