User Manual High Performance AC Drive
User Manual High Performance AC Drive
User Manual High Performance AC Drive
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
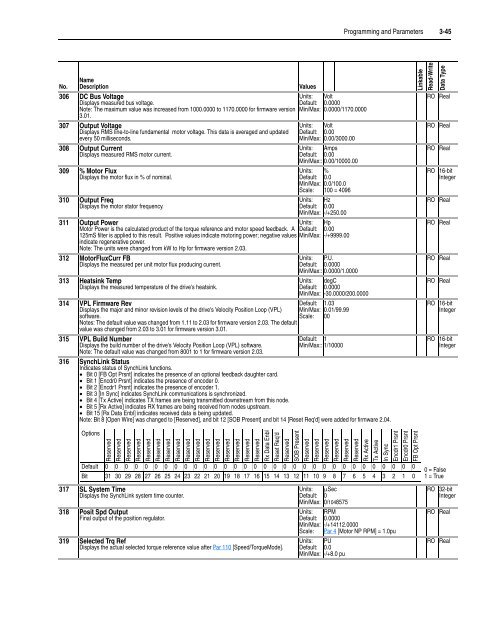
Programming and Parameters 3-45No.NameDescription306 DC Bus VoltageDisplays measured bus voltage.Note: The maximum value was increased from 1000.0000 to 1170.0000 for firmware version3.01.307 Output VoltageDisplays RMS line-to-line fundamental motor voltage. This data is averaged and updatedevery 50 milliseconds.308 Output CurrentDisplays measured RMS motor current.309 % Motor FluxDisplays the motor flux in % of nominal.310 Output FreqDisplays the motor stator frequency.ValuesUnits: VoltDefault: 0.0000Min/Max: 0.0000/1170.0000Units: VoltDefault: 0.00Min/Max: 0.00/3000.00Units:Default:Min/Max::Amps0.000.00/10000.00Units: %Default: 0.0Min/Max: 0.0/100.0Scale: 100 = 4096Units: HzDefault: 0.00Min/Max: -/+250.00311 Output PowerUnits: HpMotor Power is the calculated product of the torque reference and motor speed feedback. A Default: 0.00125mS filter is applied to this result. Positive values indicate motoring power; negative values Min/Max: -/+9999.00indicate regenerative power.Note: The units were changed from kW to Hp for firmware version 2.03.312 MotorFluxCurr FBDisplays the measured per unit motor flux producing current.313 Heatsink TempDisplays the measured temperature of the drive's heatsink.314 VPL Firmware RevDisplays the major and minor revision levels of the drive's Velocity Position Loop (VPL)software.Notes: The default value was changed from 1.11 to 2.03 for firmware version 2.03. The defaultvalue was changed from 2.03 to 3.01 for firmware version 3.01.Units:Default:Min/Max::P.U.0.00000.0000/1.0000Units: degCDefault: 0.0000Min/Max: -30.0000/200.0000Default:Min/Max:Scale:1.030.01/99.9900315 VPL Build NumberDefault: 1Displays the build number of the drive's Velocity Position Loop (VPL) software.Min/Max:: 1/10000Note: The default value was changed from 8001 to 1 for firmware version 2.03.316 SynchLink StatusIndicates status of SynchLink functions.• Bit 0 [FB Opt Prsnt] indicates the presence of an optional feedback daughter card.• Bit 1 [Encdr0 Prsnt] indicates the presence of encoder 0.• Bit 2 [Encdr1 Prsnt] indicates the presence of encoder 1.• Bit 3 [In Sync] indicates SynchLink communications is synchronized.• Bit 4 [Tx Active] indicates TX frames are being transmitted downstream from this node.• Bit 5 [Rx Active] indicates RX frames are being received from nodes upstream.• Bit 15 [Rx Data Enbl] indicates received data is being updated.Note: Bit 8 [Open Wire] was changed to [Reserved], and bit 12 [SOB Present] and bit 14 [Reset Req’d] were added for firmware 2.04.LinkableRead-WriteData TypeRO RealRO RealRO RealRO 16-bitIntegerRO RealRO RealRO RealRO RealRO 16-bitIntegerRO 16-bitIntegerOptionsReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedRx Data EnblReset Req'dReservedSOB PresentReservedReservedReservedReservedReservedReservedRx ActiveTx ActiveIn SyncEncdr1 PrsntEncdr0 PrsntFB Opt PrsntDefault 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0Bit 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0317 SL System TimeDisplays the SynchLink system time counter.318 Posit Spd OutputFinal output of the position regulator.319 Selected Trq RefDisplays the actual selected torque reference value after Par 110 [Speed/TorqueMode].Units: µSecDefault: 0Min/Max: 0/1048575Units: RPMDefault: 0.0000Min/Max: -/+14112.0000Scale: Par 4 [Motor NP RPM] = 1.0puUnits: PUDefault: 0.0Min/Max: -/+8.0 pu0 = False1 = TrueRO 32-bitIntegerRO RealRO Real