User Manual High Performance AC Drive
User Manual High Performance AC Drive
User Manual High Performance AC Drive
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
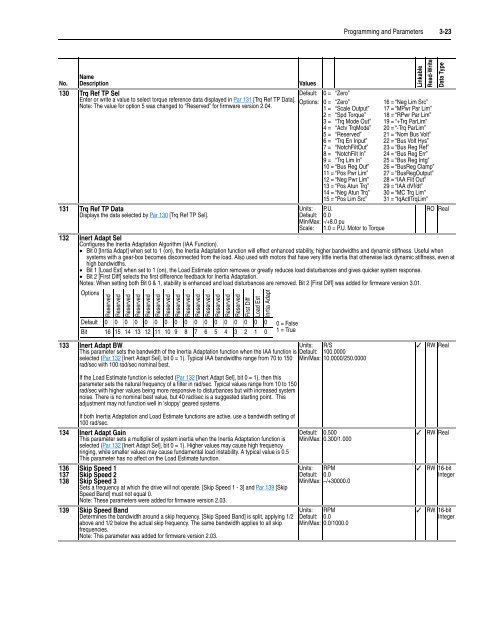
Programming and Parameters 3-23NameNo. DescriptionValues130 Trq Ref TP SelDefault: 0 = “Zero”Enter or write a value to select torque reference data displayed in Par 131 [Trq Ref TP Data]. Options: 0 = “Zero”Note: The value for option 5 was changed to “Reserved” for firmware version 2.04.1 = “Scale Output”2 =3 =4 =5 =6 =7 =8 =9 =“Spd Torque”“Trq Mode Out”“Actv TrqMode”“Reserved”“Trq En Input”“NotchFiltOut”“NotchFilt In”“Trq Lim In”10 = “Bus Reg Out”11 = “Pos Pwr Lim”12 = “Neg Pwr Lim”13 = “Pos Atun Trq”14 = “Neg Atun Trq”15 = “Pos Lim Src”131 Trq Ref TP DataDisplays the data selected by Par 130 [Trq Ref TP Sel].Units: P.U.Default: 0.0Min/Max: -/+8.0 puScale: 1.0 = P.U. Motor to Torque16 = “Neg Lim Src”17 = “MPwr Par Lim”18 = “RPwr Par Lim”19 = “+Trq ParLim”20 = “-Trq ParLim”21 = “Nom Bus Volt”22 = “Bus Volt Hys”23 = “Bus Reg Ref”24 = “Bus Reg Err”25 = “Bus Reg Intg”26 = “BusReg Clamp”27 = “BusRegOutput”28 = “IAA Filt Out”29 = “IAA dVf/dt”30 = “MC Trq Lim”31 = “IqActlTrqLim”RO Real132 Inert Adapt SelConfigures the Inertia Adaptation Algorithm (IAA Function).• Bit 0 [Inrtia Adapt] when set to 1 (on), the Inertia Adaptation function will effect enhanced stability, higher bandwidths and dynamic stiffness. Useful whensystems with a gear-box becomes disconnected from the load. Also used with motors that have very little inertia that otherwise lack dynamic stiffness, even athigh bandwidths.• Bit 1 [Load Est] when set to 1 (on), the Load Estimate option removes or greatly reduces load disturbances and gives quicker system response.• Bit 2 [First Diff] selects the first difference feedback for Inertia Adaptation.Notes: When setting both Bit 0 & 1, stability is enhanced and load disturbances are removed. Bit 2 [First Diff] was added for firmware version 3.01.OptionsReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedFirst DiffLoad EstInrtia AdaptDefault 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0Bit 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 00 = False1 = True133 Inert Adapt BWUnits: R/SThis parameter sets the bandwidth of the Inertia Adaptation function when the IAA function is Default: 100.0000selected (Par 132 [Inert Adapt Sel], bit 0 = 1). Typical IAA bandwidths range from 70 to 150 Min/Max: 10.0000/250.0000rad/sec with 100 rad/sec nominal best.If the Load Estimate function is selected (Par 132 [Inert Adapt Sel], bit 0 = 1), then thisparameter sets the natural frequency of a filter in rad/sec. Typical values range from 10 to 150rad/sec with higher values being more responsive to disturbances but with increased systemnoise. There is no nominal best value, but 40 rad/sec is a suggested starting point. Thisadjustment may not function well in 'sloppy' geared systems.LinkableRead-WriteData Type✓RW RealIf both Inertia Adaptation and Load Estimate functions are active, use a bandwidth setting of100 rad/sec.134 Inert Adapt GainThis parameter sets a multiplier of system inertia when the Inertia Adaptation function isselected (Par 132 [Inert Adapt Sel], bit 0 = 1). <strong>High</strong>er values may cause high frequencyringing, while smaller values may cause fundamental load instability. A typical value is 0.5This parameter has no affect on the Load Estimate function.136137138Skip Speed 1Skip Speed 2Skip Speed 3Sets a frequency at which the drive will not operate. [Skip Speed 1 - 3] and Par 139 [SkipSpeed Band] must not equal 0.Note: These parameters were added for firmware version 2.03.139 Skip Speed BandDetermines the bandwidth around a skip frequency. [Skip Speed Band] is split, applying 1/2above and 1/2 below the actual skip frequency. The same bandwidth applies to all skipfrequencies.Note: This parameter was added for firmware version 2.03.Default:Min/Max: 0.5000.300/1.000Units: RPMDefault: 0.0Min/Max: –/+30000.0Units: RPMDefault: 0.0Min/Max: 0.0/1000.0✓✓✓RW RealRW 16-bitIntegerRW 16-bitInteger