User Manual High Performance AC Drive
User Manual High Performance AC Drive
User Manual High Performance AC Drive
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
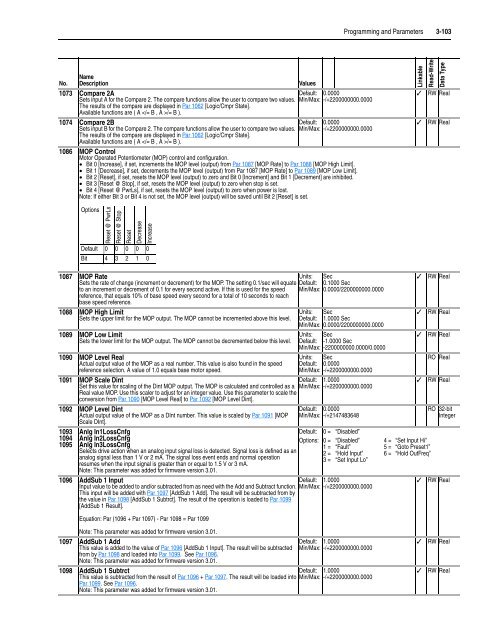
Programming and Parameters 3-103No.NameDescription1073 Compare 2ASets input A for the Compare 2. The compare functions allow the user to compare two values.The results of the compare are displayed in Par 1062 [Logic/Cmpr State].Available functions are ( A /= B ).1074 Compare 2BSets input B for the Compare 2. The compare functions allow the user to compare two values.The results of the compare are displayed in Par 1062 [Logic/Cmpr State].Available functions are ( A /= B ).ValuesDefault: 0.0000Min/Max: -/+2200000000.0000Default: 0.0000Min/Max: -/+2200000000.00001086 MOP ControlMotor Operated Potentiometer (MOP) control and configuration.• Bit 0 [Increase], if set, increments the MOP level (output) from Par 1087 [MOP Rate] to Par 1088 [MOP <strong>High</strong> Limit].• Bit 1 [Decrease], if set, decrements the MOP level (output) from Par 1087 [MOP Rate] to Par 1089 [MOP Low Limit].• Bit 2 [Reset], if set, resets the MOP level (output) to zero and Bit 0 [Increment] and Bit 1 [Decrement] are inhibited.• Bit 3 [Reset @ Stop], if set, resets the MOP level (output) to zero when stop is set.• Bit 4 [Reset @ PwrLs], if set, resets the MOP level (output) to zero when power is lost.Note: If either Bit 3 or Bit 4 is not set, the MOP level (output) will be saved until Bit 2 [Reset] is set.LinkableRead-WriteData Type✓RW Real✓ RW Real1087 MOP RateUnits: SecSets the rate of change (increment or decrement) for the MOP. The setting 0.1/sec will equate Default: 0.1000 Secto an increment or decrement of 0.1 for every second active. If this is used for the speed Min/Max: 0.0000/2200000000.0000reference, that equals 10% of base speed every second for a total of 10 seconds to reachbase speed reference.1088 MOP <strong>High</strong> LimitSets the upper limit for the MOP output. The MOP cannot be incremented above this level.1089 MOP Low LimitSets the lower limit for the MOP output. The MOP cannot be decremented below this level.1090 MOP Level RealActual output value of the MOP as a real number. This value is also found in the speedreference selection. A value of 1.0 equals base motor speed.Units: SecDefault: 1.0000 SecMin/Max: 0.0000/2200000000.0000Units: SecDefault: -1.0000 SecMin/Max: -2200000000.0000/0.0000Units: SecDefault: 0.0000Min/Max: -/+2200000000.00001091 MOP Scale DintDefault: 1.0000Set this value for scaling of the Dint MOP output. The MOP is calculated and controlled as a Min/Max: -/+2200000000.0000Real value MOP. Use this scaler to adjust for an integer value. Use this parameter to scale theconversion from Par 1090 [MOP Level Real] to Par 1092 [MOP Level Dint].1092 MOP Level DintActual output value of the MOP as a DInt number. This value is scaled by Par 1091 [MOPScale DInt].109310941095OptionsReset @ PwrLsReset @ StopResetDecreaseIncreaseDefault 0 0 0 0 0Bit 4 3 2 1 0Anlg In1LossCnfgDefault:Anlg In2LossCnfgOptions:Anlg In3LossCnfgSelects drive action when an analog input signal loss is detected. Signal loss is defined as ananalog signal less than 1 V or 2 mA. The signal loss event ends and normal operationresumes when the input signal is greater than or equal to 1.5 V or 3 mA.Note: This parameter was added for firmware version 3.01.Default: 0.0000Min/Max: -/+21474836480 =0 =1 =2 =3 =“Disabled”“Disabled”“Fault”“Hold Input”“Set Input Lo”1096 AddSub 1 InputDefault: 1.0000Input value to be added to and/or subtracted from as need with the Add and Subtract function. Min/Max: -/+2200000000.0000This input will be added with Par 1097 [AddSub 1 Add]. The result will be subtracted from bythe value in Par 1098 [AddSub 1 Subtrct]. The result of the operation is loaded to Par 1099[AddSub 1 Result].Equation: Par (1096 + Par 1097) - Par 1098 = Par 1099✓✓✓✓4 = “Set Input Hi”5 = “Goto Preset1”6 = “Hold OutFreq”✓RW RealRW RealRW RealRO RealRW RealRO 32-bitIntegerRW RealNote: This parameter was added for firmware version 3.01.1097 AddSub 1 AddThis value is added to the value of Par 1096 [AddSub 1 Input]. The result will be subtractedfrom by Par 1098 and loaded into Par 1099. See Par 1096.Note: This parameter was added for firmware version 3.01.Default: 1.0000Min/Max: -/+2200000000.00001098 AddSub 1 SubtrctDefault: 1.0000This value is subtracted from the result of Par 1096 + Par 1097. The result will be loaded into Min/Max: -/+2200000000.0000Par 1099. See Par 1096.Note: This parameter was added for firmware version 3.01.✓✓RW RealRW Real