User Manual High Performance AC Drive
User Manual High Performance AC Drive
User Manual High Performance AC Drive
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
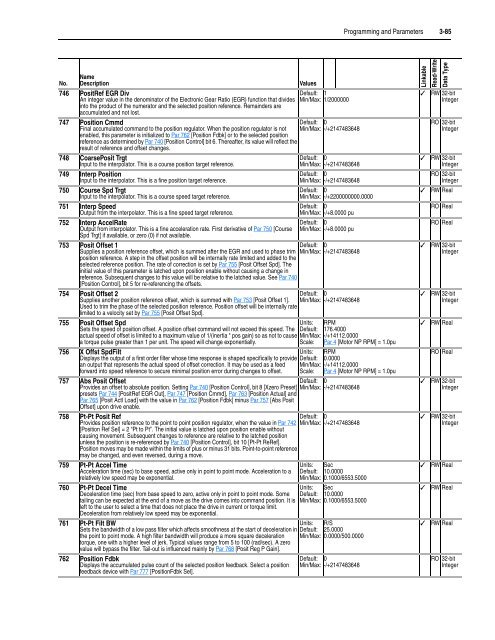
Programming and Parameters 3-85No.NameDescription746 PositRef EGR DivAn integer value in the denominator of the Electronic Gear Ratio (EGR) function that dividesinto the product of the numerator and the selected position reference. Remainders areaccumulated and not lost.Default: 1Min/Max: 1/2000000747 Position CmmdDefault: 0Final accumulated command to the position regulator. When the position regulator is not Min/Max: -/+2147483648enabled, this parameter is initialized to Par 762 [Position Fdbk] or to the selected positionreference as determined by Par 740 [Position Control] bit 6. Thereafter, its value will reflect theresult of reference and offset changes.748 CoarsePosit TrgtInput to the interpolator. This is a course position target reference.749 Interp PositionInput to the interpolator. This is a fine position target reference.750 Course Spd TrgtInput to the interpolator. This is a course speed target reference.751 Interp SpeedOutput from the interpolator. This is a fine speed target reference.752 Interp AccelRateOutput from interpolator. This is a fine acceleration rate. First derivative of Par 750 [CourseSpd Trgt] if available, or zero (0) if not available.Default: 0Min/Max: -/+2147483648Default: 0Min/Max: -/+2147483648Default: 0Min/Max: -/+2200000000.0000Default: 0Min/Max: -/+8.0000 puDefault: 0Min/Max: -/+8.0000 pu753 Posit Offset 1Default: 0Supplies a position reference offset, which is summed after the EGR and used to phase trim Min/Max: -/+2147483648position reference. A step in the offset position will be internally rate limited and added to theselected reference position. The rate of correction is set by Par 755 [Posit Offset Spd]. Theinitial value of this parameter is latched upon position enable without causing a change inreference. Subsequent changes to this value will be relative to the latched value. See Par 740[Position Control], bit 5 for re-referencing the offsets.754 Posit Offset 2Default: 0Supplies another position reference offset, which is summed with Par 753 [Posit Offset 1]. Min/Max: -/+2147483648Used to trim the phase of the selected position reference. Position offset will be internally ratelimited to a velocity set by Par 755 [Posit Offset Spd].755 Posit Offset SpdUnits: RPMSets the speed of position offset. A position offset command will not exceed this speed. The Default: 176.4000actual speed of offset is limited to a maximum value of 1/(inertia * pos gain) so as not to cause Min/Max: -/+14112.0000a torque pulse greater than 1 per unit. The speed will change exponentially.Scale: Par 4 [Motor NP RPM] = 1.0pu756 X Offst SpdFiltUnits: RPMDisplays the output of a first order filter whose time response is shaped specifically to provide Default: 0.0000an output that represents the actual speed of offset correction. It may be used as a feed Min/Max: -/+14112.0000forward into speed reference to secure minimal position error during changes to offset. Scale: Par 4 [Motor NP RPM] = 1.0pu757 Abs Posit OffsetDefault: 0Provides an offset to absolute position. Setting Par 740 [Position Control], bit 8 [Xzero Preset] Min/Max: -/+2147483648presets Par 744 [PositRef EGR Out], Par 747 [Position Cmmd], Par 763 [Position Actual] andPar 765 [Posit Actl Load] with the value in Par 762 [Position Fdbk] minus Par 757 [Abs PositOffset] upon drive enable.758 Pt-Pt Posit RefDefault: 0Provides position reference to the point to point position regulator, when the value in Par 742 Min/Max: -/+2147483648[Position Ref Sel] = 2 “Pt to Pt”. The initial value is latched upon position enable withoutcausing movement. Subsequent changes to reference are relative to the latched positionunless the position is re-referenced by Par 740 [Position Control], bit 10 [Pt-Pt ReRef].Position moves may be made within the limits of plus or minus 31 bits. Point-to-point referencemay be changed, and even reversed, during a move.759 Pt-Pt Accel TimeAcceleration time (sec) to base speed, active only in point to point mode. Acceleration to arelatively low speed may be exponential.760 Pt-Pt Decel TimeDeceleration time (sec) from base speed to zero, active only in point to point mode. Sometailing can be expected at the end of a move as the drive comes into command position. It isleft to the user to select a time that does not place the drive in current or torque limit.Deceleration from relatively low speed may be exponential.Units: SecDefault: 10.0000Min/Max: 0.1000/6553.5000Units: SecDefault: 10.0000Min/Max: 0.1000/6553.5000761 Pt-Pt Filt BWUnits: R/SSets the bandwidth of a low pass filter which affects smoothness at the start of deceleration in Default: 25.0000the point to point mode. A high filter bandwidth will produce a more square deceleration Min/Max: 0.0000/500.0000torque, one with a higher level of jerk. Typical values range from 5 to 100 (rad/sec). A zerovalue will bypass the filter. Tail-out is influenced mainly by Par 768 [Posit Reg P Gain].762 Position FdbkDisplays the accumulated pulse count of the selected position feedback. Select a positionfeedback device with Par 777 [PositionFdbk Sel].ValuesDefault: 0Min/Max: -/+2147483648LinkableRead-WriteData Type✓✓✓✓✓✓✓✓✓✓✓RW 32-bitIntegerRO 32-bitIntegerRW 32-bitIntegerRO 32-bitIntegerRW RealRO RealRO RealRW 32-bitIntegerRW 32-bitIntegerRW RealRO RealRW 32-bitIntegerRW 32-bitIntegerRW RealRW RealRW RealRO 32-bitInteger