User Manual High Performance AC Drive
User Manual High Performance AC Drive
User Manual High Performance AC Drive
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
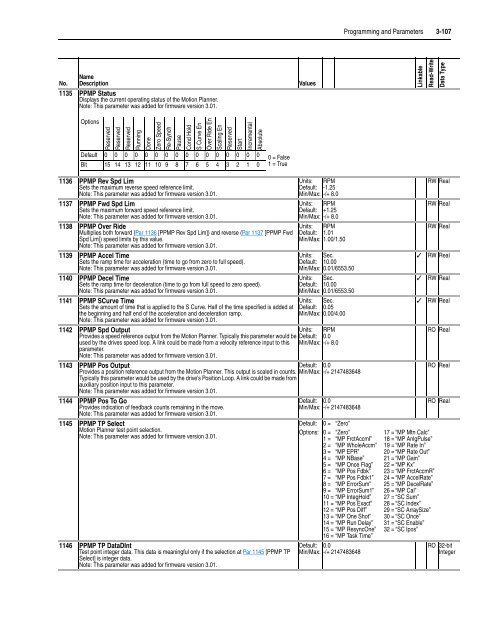
Programming and Parameters 3-107NameNo. Description1135 PPMP StatusDisplays the current operating status of the Motion Planner.Note: This parameter was added for firmware version 3.01.OptionsReservedReservedReservedRunningDoneZero SpeedRe-SynchPauseCond HoldS Curve EnOver Ride EnScaling EnReservedStartIncrementalAbsoluteDefault 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 00 = False1 = TrueValuesLinkableRead-WriteData Type1136 PPMP Rev Spd LimSets the maximum reverse speed reference limit.Note: This parameter was added for firmware version 3.01.1137 PPMP Fwd Spd LimSets the maximum forward speed reference limit.Note: This parameter was added for firmware version 3.01.1138 PPMP Over RideMultiplies both forward (Par 1136 [PPMP Rev Spd Lim]) and reverse (Par 1137 [PPMP FwdSpd Lim]) speed limits by this value.Note: This parameter was added for firmware version 3.01.1139 PPMP Accel TimeSets the ramp time for acceleration (time to go from zero to full speed).Note: This parameter was added for firmware version 3.01.1140 PPMP Decel TimeSets the ramp time for deceleration (time to go from full speed to zero speed).Note: This parameter was added for firmware version 3.01.1141 PPMP SCurve TimeSets the amount of time that is applied to the S Curve. Half of the time specified is added atthe beginning and half end of the acceleration and deceleration ramp.Note: This parameter was added for firmware version 3.01.Units: RPMDefault: -1.25Min/Max: -/+ 8.0Units: RPMDefault: +1.25Min/Max: -/+ 8.0Units: RPMDefault: 1.01Min/Max: 1.00/1.50Units: Sec.Default: 10.00Min/Max: 0.01/6553.50Units: Sec.Default: 10.00Min/Max: 0.01/6553.50Units: Sec.Default: 0.05Min/Max: 0.00/4.001142 PPMP Spd OutputUnits: RPMProvides a speed reference output from the Motion Planner. Typically this parameter would be Default: 0.0used by the drives speed loop. A link could be made from a velocity reference input to this Min/Max: -/+ 8.0parameter.Note: This parameter was added for firmware version 3.01.1143 PPMP Pos OutputDefault: 0.0Provides a position reference output from the Motion Planner. This output is scaled in counts. Min/Max: -/+ 2147483648Typically this parameter would be used by the drive's Position Loop. A link could be made fromauxiliary position input to this parameter.Note: This parameter was added for firmware version 3.01.1144 PPMP Pos To GoProvides indication of feedback counts remaining in the move.Note: This parameter was added for firmware version 3.01.1145 PPMP TP SelectMotion Planner test point selection.Note: This parameter was added for firmware version 3.01.1146 PPMP TP DataDIntTest point integer data. This data is meaningful only if the selection at Par 1145 [PPMP TPSelect] is integer data.Note: This parameter was added for firmware version 3.01.Default: 0.0Min/Max: -/+ 2147483648Default:Options:0 =0 =1 =2 =3 =4 =5 =6 =7 =8 =9 =“Zero”“Zero”“MP FrctAccmI”“MP WholeAccm”“MP EPR”“MP NBase”“MP Once Flag”“MP Pos Fdbk”“MP Pos Fdbk1”“MP ErrorSum”“MP ErrorSum1”10 = “MP IntegHold”11 = “MP Pos Exact”12 = “MP Pos Diff”13 = “MP One Shot”14 = “MP Run Delay”15 = “MP ResyncOne”16 = “MP Task Time”Default: 0.0Min/Max: -/+ 2147483648✓✓✓17 = “MP Mtn Calc”18 = “MP AnlgPulse”19 = “MP Rate In”20 = “MP Rate Out”21 = “MP Gain”22 = “MP Kx”23 = “MP FrctAccmR”24 = “MP AccelRate”25 = “MP DecelRate”26 = “MP Cal”27 = “SC Sum”28 = “SC Index”29 = “SC ArraySize”30 = “SC Once”31 = “SC Enable”32 = “SC Ipos”RW RealRW RealRW RealRW RealRW RealRW RealRO RealRO RealRO RealRO 32-bitInteger